Smart TSP Benchmark is a professional algorithm testing infrastructure with customizable scenarios and detailed metrics.

Project description
Smart TSP Benchmark v1.0.1
Smart TSP Benchmark is a professional algorithm testing infrastructure with customizable scenarios and detailed metrics.











⚠️ Disclaimer
By using this software, you agree to the full disclaimer terms.
Summary: Software provided "AS IS" without warranty. You assume all risks.
Full legal disclaimer: See DISCLAIMER.md
Install
pip install smart-tsp-solver
Example
Launch using Smart TSP Solver
pip install smart-tsp-solver
from smart_tsp_benchmark.tsp_benchmark import TSPBenchmark, AlgorithmConfig
from smart_tsp_solver import hierarchical_tsp_solver_v2
from smart_tsp_solver.algorithms.angular_radial.v1 import angular_radial_tsp_v1
from smart_tsp_solver.algorithms.angular_radial.v2 import angular_radial_tsp_v2
from smart_tsp_solver.algorithms.dynamic_gravity.v1 import dynamic_gravity_tsp_v1
from smart_tsp_solver.algorithms.dynamic_gravity.v2 import dynamic_gravity_tsp_v2
from smart_tsp_solver.algorithms.other.greedy.v2 import greedy_tsp_v2
def main():
config = {
'n_points': 100,
'seed': 123,
'point_generation': 'random',
'use_post_optimization': False,
'plot_results': True,
'verbose': True
}
benchmark = TSPBenchmark(config=config)
benchmark.add_algorithm(
name='Angular-radial v1',
config=AlgorithmConfig(
function=angular_radial_tsp_v1,
params={
"sort_by": "angle_distance",
"look_ahead": 100,
"max_2opt_iter": 100
},
post_optimize=True,
description="Angular-radial v1",
is_class=False
)
)
benchmark.add_algorithm(
name='Angular-radial v2',
config=AlgorithmConfig(
function=angular_radial_tsp_v2,
params={
"sort_by": "angle_distance",
"look_ahead": 100,
"max_2opt_iter": 100
},
post_optimize=True,
description="Angular-radial v2",
is_class=False
)
)
benchmark.add_algorithm(
name='Dynamic-gravity v1',
config=AlgorithmConfig(
function=dynamic_gravity_tsp_v1,
params={
"delta": 0.5,
"fast_2opt_iter": 100
},
post_optimize=True,
description="Dynamic-gravity v1",
is_class=False
)
)
benchmark.add_algorithm(
name='Dynamic-gravity v2',
config=AlgorithmConfig(
function=dynamic_gravity_tsp_v2,
params={
"delta": 0.5,
"fast_2opt_iter": 100
},
post_optimize=True,
description="Dynamic-gravity v2",
is_class=False
)
)
benchmark.add_algorithm(
name='Greedy v2',
config=AlgorithmConfig(
function=greedy_tsp_v2,
params={},
post_optimize=False,
description="Classic greedy TSP algorithm",
is_class=False,
)
)
benchmark.add_algorithm(
name='Hierarchical TSP',
config=AlgorithmConfig(
function=hierarchical_tsp_solver_v2,
params={
"cluster_size": 100,
"post_optimize": True
},
post_optimize=False,
description="Hierarchical clustering TSP solver",
is_class=False
)
)
benchmark.run_benchmark()
if __name__ == '__main__':
main()
An example of testing TSP algorithms here
Related Research
Position-Candidate-Hypothesis (PCH) Paradigm: doi.org/10.5281/zenodo.17614888 - A New Research Direction for NP-Complete Problems
For those interested in the theoretical foundations:
- Smart TSP Solver - My Python library featuring advanced heuristics (
Dynamic Gravity,Angular Radial) for solving large TSP instances where finding the exact optimum is impractical. - Exact TSP Solutions (TSP ORACLE): exact-tsp-solver - Optimal solutions for small instances
- Smart TSP Oracle - Smart TSP Oracle A high-performance, exact solver for the Traveling Salesman Problem (TSP) implemented in Python. Utilizes an intelligent Branch and Bound algorithm with adaptive thresholding to find the globally optimal solution for small to medium-sized TSP instances.
- Spatial Optimization: Computational geometry approaches for large-scale problems
- Heuristic Analysis: Comparative study of modern TSP approaches
Advanced Visualization
Sample Output
==================================================
SMART TSP ALGORITHMS BENCHMARK
==================================================
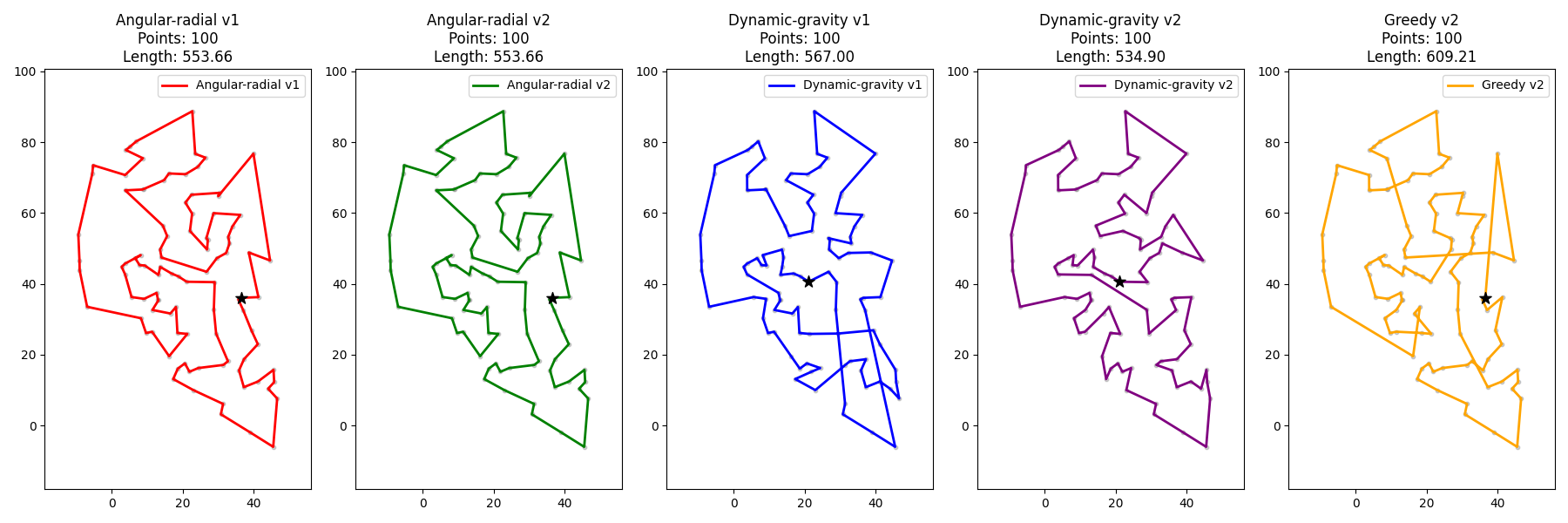
Cities: 100
Seed: 123
Generation: cluster
Post-opt: OFF
Algorithms:
- Angular-radial v1: sort_by=angle_distance, look_ahead=1001, max_2opt_iter=1001
- Angular-radial v2: sort_by=angle_distance, look_ahead=1000, max_2opt_iter=1001
- Dynamic-gravity v1: delta=0.5, fast_2opt_iter=1001
- Dynamic-gravity v2: delta=0.5, fast_2opt_iter=1001
- Greedy v2: start_point=0
==================================================
==================================================
Running Angular-radial v1 algorithm...
Description: Angular-radial v1
Parameters: sort_by=angle_distance, look_ahead=1001, max_2opt_iter=1001
Completed in 0.0842 seconds
Route length: 553.66
==================================================
==================================================
Running Angular-radial v2 algorithm...
Description: Angular-radial v2
Parameters: sort_by=angle_distance, look_ahead=1000, max_2opt_iter=1001
Completed in 0.0088 seconds
Route length: 553.66
==================================================
==================================================
Running Dynamic-gravity v1 algorithm...
Description: Dynamic gravity v1
Parameters: delta=0.5, fast_2opt_iter=1001
Completed in 0.0075 seconds
Route length: 567.00
==================================================
==================================================
Running Dynamic-gravity v2 algorithm...
Description: Dynamic gravity v2
Parameters: delta=0.5, fast_2opt_iter=1001
Completed in 0.0073 seconds
Route length: 534.90
==================================================
==================================================
Running Greedy v2 algorithm...
Description: Classic greedy TSP algorithm
Parameters: start_point=0
Completed in 0.0016 seconds
Route length: 609.21
==================================================
==============================================================================================================================
DETAILED ALGORITHM COMPARISON
==============================================================================================================================
Algorithm | Time (s) | vs Best | Length | vs Best | Params
------------------------------------------------------------------------------------------------------------------------------
Greedy v2 | 0.0016 | BEST | 609.21 | +13.89% | start_point=0
Dynamic-gravity v2 | 0.0073 | +348.65% | 534.90 | BEST | delta=0.5, fast_2opt_iter=1001
Dynamic-gravity v1 | 0.0075 | +361.28% | 567.00 | +6.00% | delta=0.5, fast_2opt_iter=1001
Angular-radial v2 | 0.0088 | +441.26% | 553.66 | +3.51% | sort_by=angle_distance, look_ahead=1000, max_2opt_iter=1001
Angular-radial v1 | 0.0842 | +5064.72% | 553.66 | +3.51% | sort_by=angle_distance, look_ahead=1001, max_2opt_iter=1001
==============================================================================================================================
PERFORMANCE ANALYSIS:
- Fastest algorithm(s): Greedy v2 (0.0016 sec)
- Shortest route(s): Dynamic-gravity v2 (534.90 units)
==================================================
SMART TSP ALGORITHMS BENCHMARK
==================================================
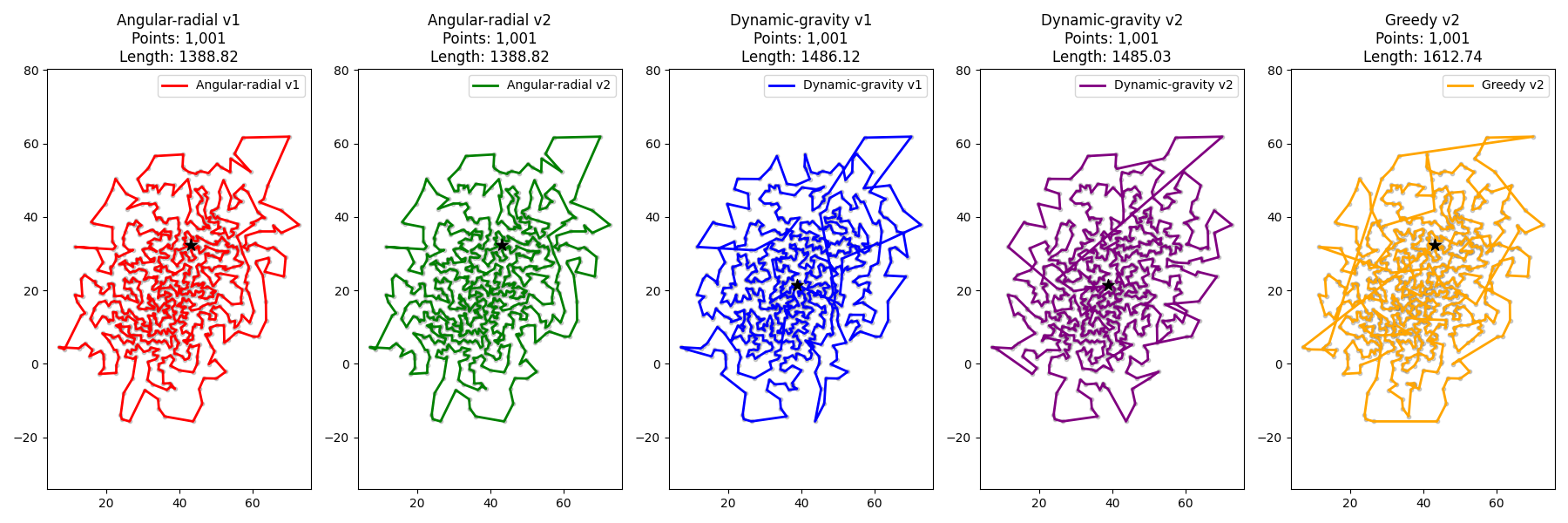
Cities: 1001
Seed: 0
Generation: cluster
Post-opt: OFF
Algorithms:
- Angular-radial v1: sort_by=angle_distance, look_ahead=1001, max_2opt_iter=1001
- Angular-radial v2: sort_by=angle_distance, look_ahead=1000, max_2opt_iter=1001
- Dynamic-gravity v1: delta=0.5, fast_2opt_iter=1001
- Dynamic-gravity v2: delta=0.5, fast_2opt_iter=1001
- Greedy v2: start_point=0
==================================================
==================================================
Running Angular-radial v1 algorithm...
Description: Angular-radial v1
Parameters: sort_by=angle_distance, look_ahead=1001, max_2opt_iter=1001
Completed in 0.2531 seconds
Route length: 1388.82
==================================================
==================================================
Running Angular-radial v2 algorithm...
Description: Angular-radial v2
Parameters: sort_by=angle_distance, look_ahead=1000, max_2opt_iter=1001
Completed in 0.1263 seconds
Route length: 1388.82
==================================================
==================================================
Running Dynamic-gravity v1 algorithm...
Description: Dynamic gravity v1
Parameters: delta=0.5, fast_2opt_iter=1001
Completed in 0.0279 seconds
Route length: 1486.12
==================================================
==================================================
Running Dynamic-gravity v2 algorithm...
Description: Dynamic gravity v2
Parameters: delta=0.5, fast_2opt_iter=1001
Completed in 0.0248 seconds
Route length: 1485.03
==================================================
==================================================
Running Greedy v2 algorithm...
Description: Classic greedy TSP algorithm
Parameters: start_point=0
Completed in 0.0022 seconds
Route length: 1612.74
==================================================
================================================================================================================================
DETAILED ALGORITHM COMPARISON
================================================================================================================================
Algorithm | Time (s) | vs Best | Length | vs Best | Params
--------------------------------------------------------------------------------------------------------------------------------
Greedy v2 | 0.0022 | BEST | 1612.74 | +16.12% | start_point=0
Dynamic-gravity v2 | 0.0248 | +1016.15% | 1485.03 | +6.93% | delta=0.5, fast_2opt_iter=1001
Dynamic-gravity v1 | 0.0279 | +1156.99% | 1486.12 | +7.01% | delta=0.5, fast_2opt_iter=1001
Angular-radial v2 | 0.1263 | +5590.97% | 1388.82 | BEST | sort_by=angle_distance, look_ahead=1000, max_2opt_iter=1001
Angular-radial v1 | 0.2531 | +11304.79% | 1388.82 | BEST | sort_by=angle_distance, look_ahead=1001, max_2opt_iter=1001
================================================================================================================================
PERFORMANCE ANALYSIS:
- Fastest algorithm(s): Greedy v2 (0.0022 sec)
- Shortest route(s): Angular-radial v1, Angular-radial v2 (1388.82 units)
Disclaimer: Performance results shown are for clustered distributions. Results may vary based on spatial characteristics. Always evaluate algorithms on your specific problem domains.
License
Licensed under BSD 3-Clause License • Copyright (©) 2026, Alexander Suvorov
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file smart_tsp_benchmark-1.0.1.tar.gz.
File metadata
- Download URL: smart_tsp_benchmark-1.0.1.tar.gz
- Upload date:
- Size: 13.7 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.14.3
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
d3aa51b0592f9a30717e755cc8a8117b41b2fef870c5b8f02726f2b2a6c21afd
|
|
| MD5 |
04aef5e8819ba857c9a987f6a1e7747b
|
|
| BLAKE2b-256 |
273e55d4d799db12949808c632663c17951a3a4e2b4c46a1667bee9aabdbf848
|
File details
Details for the file smart_tsp_benchmark-1.0.1-py3-none-any.whl.
File metadata
- Download URL: smart_tsp_benchmark-1.0.1-py3-none-any.whl
- Upload date:
- Size: 12.9 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.14.3
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
b8939798866aed1f7b9b373879c7ebb401d9822a0535b464438b155b4c9195d6
|
|
| MD5 |
66917d0f17f2bcc1c79ff1d1865c933e
|
|
| BLAKE2b-256 |
d7f7d6ca7c521221a6b8dd3f85a9ce81231db75571ef09b102015d463d3c7a9f
|







