A high-performance Python library for solving the Traveling Salesman Problem (TSP) using novel heuristic approaches. Features advanced algorithms that outperform classical methods by ~25% on real-world clustered data while maintaining practical computational efficiency.

Project description
Smart TSP Solver v1.0.1
A high-performance Python library for solving the Traveling Salesman Problem (TSP) using novel heuristic approaches. Features advanced algorithms that outperform classical methods by 25% on real-world clustered data while maintaining practical computational efficiency.












⚠️ Disclaimer
By using this software, you agree to the full disclaimer terms.
Summary: Software provided "AS IS" without warranty. You assume all risks.
Full legal disclaimer: See DISCLAIMER.md
Research-driven design: This library implements cutting-edge spatial optimization techniques including dynamic gravitational attraction modeling and angular-radial spatial indexing for intelligent pathfinding.
Features
- Dynamic Gravity Algorithms: Physics-inspired approach simulating momentum and gravitational attraction for natural, efficient routing
- Angular-Radial Methods: Space-partitioning heuristics with adaptive look-ahead for superior performance on geographical data
- Benchmarking Framework: Professional-grade testing infrastructure with configurable scenarios and detailed metrics
- High-Performance Core: Numba JIT compilation with cache optimization for near-native execution speed
Scientific Foundation
Algorithmic Innovations
Library implements two advanced heuristic approaches, each tackling the classic speed-quality trade-off in a unique way.
Dynamic Gravity Approach
Complexity: O(n²)
Concept: This algorithm models a physical process of attraction, where the next point is selected based on a combination of proximity and current direction of movement. The delta parameter acts as an "inertia coefficient," preventing sharp turns and creating smooth, natural-looking routes.
| Strengths | Ideal Use Case |
|---|---|
| • Predictable execution time • Consistently high solution quality • Efficient cluster traversal |
The balance of speed and quality, processing medium-sized datasets |
Angular-Radial Method
Complexity: O(n²) with near O(n·log n) practical performance
Concept: A "smart look-ahead" strategy (look_ahead). Points are pre-sorted in a polar coordinate system, which drastically narrows the search space for each subsequent choice. This is equivalent to a navigator scanning the nearest sector on the horizon instead of re-examining the entire map every time.
| Strengths | Ideal Use Case |
|---|---|
| • Best-in-class final route quality • Near-linear practical performance • Exceptional efficiency on clustered data |
Offline calculations where route length is critical and tasks require scaling |
Hierarchical TSP Solver
A traveling salesman problem (TSP) solver using hierarchical decomposition and metaheuristics.
Algorithm Overview
Core Philosophy: Divide-and-Conquer with Geometric Intelligence
The solver employs a multi-level hierarchical approach that mirrors human problem-solving strategies for large-scale routing:
- Spatial Decomposition: Recursively partition the problem into manageable clusters
- Local Optimization: Solve subproblems optimally within each cluster
- Global Integration: Intelligently combine local solutions into a global route
- Refinement: Apply local search to polish the final solution
Performance Comparison
| Algorithm | Complexity | Quality | Speed | Primary Use Case |
|---|---|---|---|---|
| Greedy v2 | O(n²) |
███░░ | █████ | Real-time, microseconds |
| Dynamic-gravity v2 | O(n²) |
█████ | ████░ | Balanced, milliseconds |
| Angular-radial v2 | O(n²)* |
█████ | ███░░ | Quality, offline |
Practical performance approaches O(n·log n) due to spatial heuristics. *Worst-case complexity. Practical performance is near O(n·log n) due to spatial heuristics
Benchmarking Methodology
All algorithms are compared against a highly optimized greedy implementation featuring:
- Numba JIT compilation with
fastmathand caching - Euclidean distance optimization with squared distance comparisons
- Memory-efficient visited node tracking
- Reproducible results through seed-based initialization
This ensures fair comparison against a professionally implemented baseline rather than naive reference implementations.
Installation
Install
pip install smart-tsp-solver
Example
Launch using Smart TSP Benchmark
pip install smart-tsp-benchmark
from smart_tsp_benchmark.tsp_benchmark import TSPBenchmark, AlgorithmConfig
from smart_tsp_solver import hierarchical_tsp_solver_v2
from smart_tsp_solver.algorithms.angular_radial.v1 import angular_radial_tsp_v1
from smart_tsp_solver.algorithms.angular_radial.v2 import angular_radial_tsp_v2
from smart_tsp_solver.algorithms.dynamic_gravity.v1 import dynamic_gravity_tsp_v1
from smart_tsp_solver.algorithms.dynamic_gravity.v2 import dynamic_gravity_tsp_v2
from smart_tsp_solver.algorithms.other.greedy.v2 import greedy_tsp_v2
def main():
config = {
'n_points': 1000,
'seed': 123,
'point_generation': 'cluster',
'use_post_optimization': False,
'plot_results': True,
'verbose': True
}
benchmark = TSPBenchmark(config=config)
benchmark.add_algorithm(
name='Angular-radial v1',
config=AlgorithmConfig(
function=angular_radial_tsp_v1,
params={
"sort_by": "angle_distance",
"look_ahead": 100,
"max_2opt_iter": 100
},
post_optimize=True,
description="Angular-radial v1",
is_class=False
)
)
benchmark.add_algorithm(
name='Angular-radial v2',
config=AlgorithmConfig(
function=angular_radial_tsp_v2,
params={
"sort_by": "angle_distance",
"look_ahead": 100,
"max_2opt_iter": 100
},
post_optimize=True,
description="Angular-radial v2",
is_class=False
)
)
benchmark.add_algorithm(
name='Dynamic-gravity v1',
config=AlgorithmConfig(
function=dynamic_gravity_tsp_v1,
params={
"delta": 0.5,
"fast_2opt_iter": 100
},
post_optimize=True,
description="Dynamic-gravity v1",
is_class=False
)
)
benchmark.add_algorithm(
name='Dynamic-gravity v2',
config=AlgorithmConfig(
function=dynamic_gravity_tsp_v2,
params={
"delta": 0.5,
"fast_2opt_iter": 100
},
post_optimize=True,
description="Dynamic-gravity v2",
is_class=False
)
)
benchmark.add_algorithm(
name='Greedy v2',
config=AlgorithmConfig(
function=greedy_tsp_v2,
params={},
post_optimize=False,
description="Classic greedy TSP algorithm",
is_class=False,
)
)
benchmark.add_algorithm(
name='Hierarchical TSP',
config=AlgorithmConfig(
function=hierarchical_tsp_solver_v2,
params={
"cluster_size": 100,
"post_optimize": True
},
post_optimize=False,
description="Hierarchical clustering TSP solver",
is_class=False
)
)
benchmark.run_benchmark()
if __name__ == '__main__':
main()
Example
git clone https://github.com/smartlegionlab/smart-tsp-solver.git
cd smart-tsp-solver
python -m venv venv
source venv/bin/activate
pip install -r requirements.txt
python main.py
Comprehensive Performance Analysis
Experimental Results
Smart TSP Algorithms Benchmark Report
Our comprehensive benchmarking reveals a clear performance-quality tradeoff across different problem scales, highlighting the strengths of each algorithm.
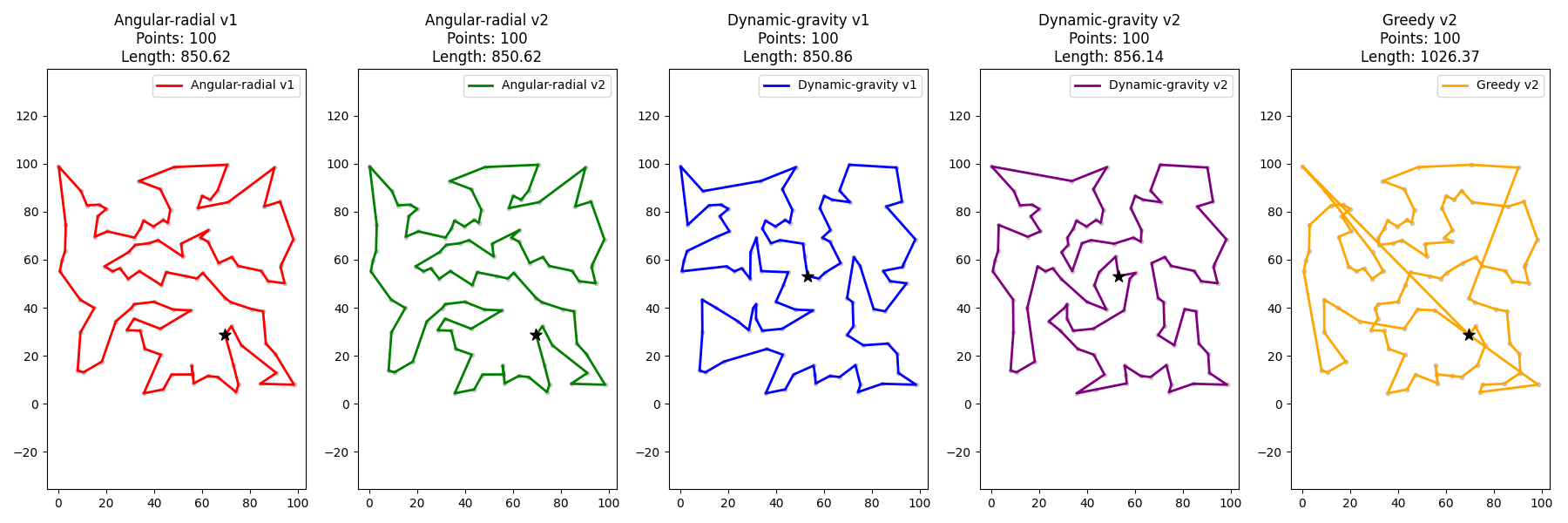
Dataset: 100 Points (Random Distribution)
Key Insight: For small-scale problems, the Dynamic-gravity v2 algorithm demonstrates the best balance, achieving near-optimal path quality while maintaining near-real-time performance.
| Algorithm | Time (s) | Δ vs Best | Route Length | Δ vs Best | Parameters |
|---|---|---|---|---|---|
| Greedy v2 | 0.0015 | BASELINE | 1026.37 | +20.66% | start_point=0 |
| Dynamic-gravity v1 | 0.0071 | +367% | 850.86 | +0.03% | delta=0.5 |
| Dynamic-gravity v2 | 0.0071 | +367% | 856.14 | +0.65% | delta=0.5 |
| Angular-radial v2 | 0.0086 | +469% | 850.62 | BASELINE | look_ahead=100 |
| Angular-radial v1 | 0.0812 | +5243% | 850.62 | BASELINE | look_ahead=100 |
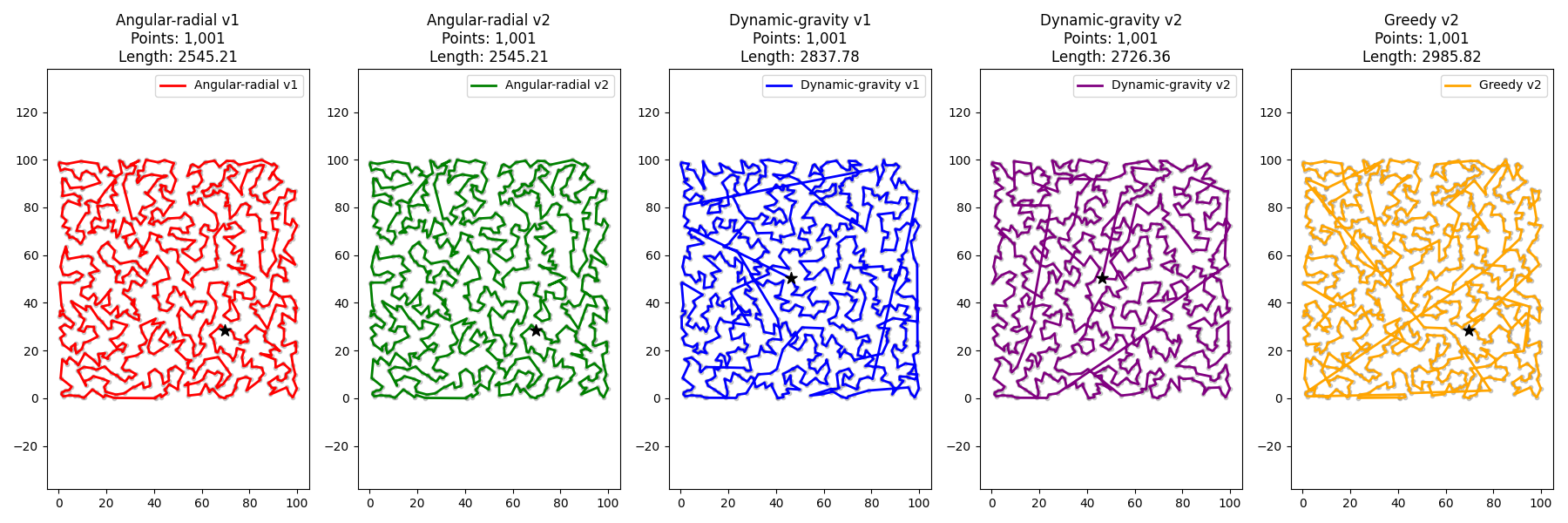
Dataset: 1001 Points (Large Random Distribution)
Key Insight: For large-scale problems, Angular-radial v2 becomes the undisputed leader in solution quality (providing a 17.3% shorter route than the Greedy algorithm). Its acceptable processing time makes it ideal for quality-sensitive offline applications.
| Algorithm | Time (s) | Δ vs Best | Route Length | Δ vs Best | Parameters |
|---|---|---|---|---|---|
| Greedy v2 | 0.0023 | BASELINE | 2985.82 | +17.31% | start_point=0 |
| Dynamic-gravity v2 | 0.0186 | +696% | 2726.36 | +7.12% | delta=0.5 |
| Dynamic-gravity v1 | 0.0321 | +1269% | 2837.78 | +11.50% | delta=0.5 |
| Angular-radial v2 | 0.1346 | +5647% | 2545.21 | BASELINE | look_ahead=1001 |
| Angular-radial v1 | 0.2555 | +10809% | 2545.21 | BASELINE | look_ahead=1001 |
Key Insights & Analysis
-
Algorithm Evolution (v1 vs. v2):
- Angular-radial v2 shows a ~2x speedup over v1 while delivering identical, best-in-class route quality.
- Dynamic-gravity v2 also demonstrates a significant speed improvement (nearly 2x on 1001 points) over v1, maintaining consistently high solution quality with better stability.
-
Algorithm Characteristics:
- Greedy v2: Extremely fast (
O(n²)), ideal for real-time applications, but sacrifices solution quality (+17-20% longer routes). - Dynamic-gravity: Offers significantly better quality than the greedy approach. It has
O(n²)complexity with higher constant factors, making it the optimal choice for medium-sized problems where a balance between speed and quality is required. - Angular-radial: The quality leader. Its use of spatial partitioning (
O(n log n)) allows it to scale best on large datasets. It is the recommended choice for offline processing where final route cost is the primary concern.
- Greedy v2: Extremely fast (
-
Practical Recommendations: The library provides a continuum of solutions for different use cases:
- Microsecond Response: Greedy v2 for interactive and real-time systems.
- Millisecond Response: Dynamic-gravity v2 for balanced needs and medium-scale problems.
- Best Quality: Angular-radial v2 for final calculations and offline processing where route cost is paramount.
Advanced Visualization
Architecture & Implementation
Performance Optimization
- Numba JIT Compilation: Critical paths compiled to native code
- Memory Efficiency: Pre-allocated arrays and minimal copying
- Cache Optimization: Intelligent memoization and reuse
- Vectorized Operations: NumPy-based efficient computations
Author
Alexander Suvorov
- Researcher specializing in computational optimization and high-performance algorithms
- Focused on bridging theoretical computer science with practical engineering applications
- This project represents extensive research into spatial optimization techniques
Explore other projects on GitHub.
Related Research
For those interested in the theoretical foundations:
- Exact TSP Solutions (TSP ORACLE): exact-tsp-solver - Optimal solutions for small instances
- Smart TSP Benchmark - Smart TSP Benchmark is a professional algorithm testing infrastructure with customizable scenarios and detailed metrics.
- Spatial Optimization: Computational geometry approaches for large-scale problems
- Heuristic Analysis: Comparative study of modern TSP approaches
License
BSD 3-Clause License: LICENSE
Copyright (©) 2026, Alexander Suvorov
Sample Output
==================================================
SMART TSP ALGORITHMS BENCHMARK
==================================================
Points: 100
Seed: 123
Generation: cluster
Post-opt: OFF
Algorithms:
- Angular-radial v1:
- Angular-radial v2:
- Dynamic-gravity v1:
- Dynamic-gravity v2:
- Greedy v2:
- Hierarchical TSP:
==================================================
==================================================
Running Angular-radial v1 algorithm...
Description: Angular-radial v1
Completed in 0.0848 seconds
Route length: 553.66
==================================================
==================================================
Running Angular-radial v2 algorithm...
Description: Angular-radial v2
Completed in 0.0082 seconds
Route length: 553.66
==================================================
==================================================
Running Dynamic-gravity v1 algorithm...
Description: Dynamic-gravity v1
Completed in 0.0070 seconds
Route length: 567.00
==================================================
==================================================
Running Dynamic-gravity v2 algorithm...
Description: Dynamic-gravity v2
Completed in 0.0067 seconds
Route length: 534.90
==================================================
==================================================
Running Greedy v2 algorithm...
Description: Classic greedy TSP algorithm
Completed in 0.0016 seconds
Route length: 609.21
==================================================
==================================================
Running Hierarchical TSP algorithm...
Description: Hierarchical clustering TSP solver
Completed in 0.0343 seconds
Route length: 524.25
==================================================
============================================================================================================================
DETAILED ALGORITHM COMPARISON
============================================================================================================================
Algorithm | Time (s) | vs Best | Length | vs Best | Params
----------------------------------------------------------------------------------------------------------------------------
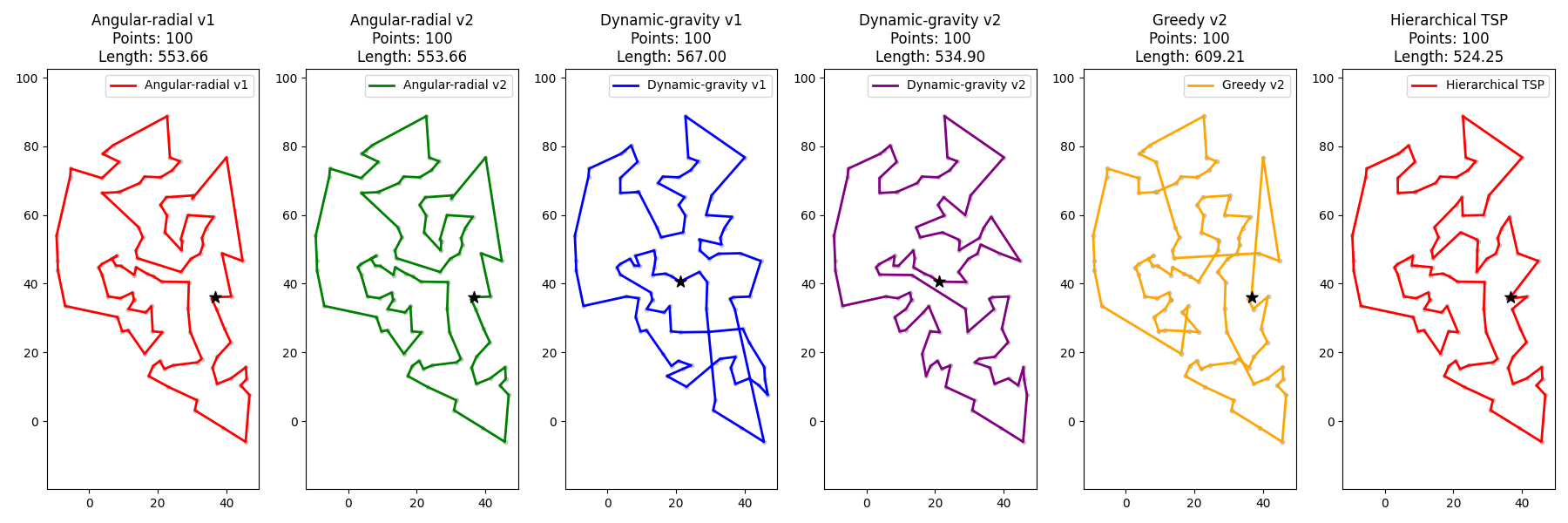
Greedy v2 | 0.0016 | BEST | 609.21 | +16.21% |
Dynamic-gravity v2 | 0.0067 | +332.71% | 534.90 | +2.03% | delta=0.5, fast_2opt_iter=100
Dynamic-gravity v1 | 0.0070 | +349.52% | 567.00 | +8.15% | delta=0.5, fast_2opt_iter=100
Angular-radial v2 | 0.0082 | +430.93% | 553.66 | +5.61% | sort_by=angle_distance, look_ahead=100, max_2opt_iter=100
Hierarchical TSP | 0.0343 | +2110.90% | 524.25 | BEST | cluster_size=100, post_optimize=True
Angular-radial v1 | 0.0848 | +5361.28% | 553.66 | +5.61% | sort_by=angle_distance, look_ahead=100, max_2opt_iter=100
============================================================================================================================
PERFORMANCE ANALYSIS:
- Fastest algorithm(s): Greedy v2 (0.0016 sec)
- Shortest route(s): Hierarchical TSP (524.25 units)
==================================================
SMART TSP ALGORITHMS BENCHMARK
==================================================
Points: 50
Seed: 123
Generation: random
Post-opt: OFF
Algorithms:
- Angular-radial v1:
- Angular-radial v2:
- Dynamic-gravity v1:
- Dynamic-gravity v2:
- Greedy v2:
==================================================
==================================================
Running Angular-radial v1 algorithm...
Description: Angular-radial v1
Parameters:
Completed in 0.0798 seconds
Route length: 658.16
==================================================
==================================================
Running Angular-radial v2 algorithm...
Description: Angular-radial v2
Parameters:
Completed in 0.0082 seconds
Route length: 658.16
==================================================
==================================================
Running Dynamic-gravity v1 algorithm...
Description: Dynamic-gravity v1
Parameters:
Completed in 0.0067 seconds
Route length: 582.13
==================================================
==================================================
Running Dynamic-gravity v2 algorithm...
Description: Dynamic-gravity v2
Parameters:
Completed in 0.0065 seconds
Route length: 577.06
==================================================
==================================================
Running Greedy v2 algorithm...
Description: Classic greedy TSP algorithm
Parameters:
Completed in 0.0016 seconds
Route length: 720.50
==================================================
============================================================================================================================
DETAILED ALGORITHM COMPARISON
============================================================================================================================
Algorithm | Time (s) | vs Best | Length | vs Best | Params
----------------------------------------------------------------------------------------------------------------------------
Greedy v2 | 0.0016 | BEST | 720.50 | +24.86% |
Dynamic-gravity v2 | 0.0065 | +321.25% | 577.06 | BEST | delta=0.5, fast_2opt_iter=100
Dynamic-gravity v1 | 0.0067 | +328.66% | 582.13 | +0.88% | delta=0.5, fast_2opt_iter=100
Angular-radial v2 | 0.0082 | +426.35% | 658.16 | +14.05% | sort_by=angle_distance, look_ahead=100, max_2opt_iter=100
Angular-radial v1 | 0.0798 | +5035.05% | 658.16 | +14.05% | sort_by=angle_distance, look_ahead=100, max_2opt_iter=100
============================================================================================================================
PERFORMANCE ANALYSIS:
- Fastest algorithm(s): Greedy v2 (0.0016 sec)
- Shortest route(s): Dynamic-gravity v2 (577.06 units)
==================================================
SMART TSP ALGORITHMS BENCHMARK
==================================================
Points: 50
Seed: 123
Generation: cluster
Post-opt: OFF
Algorithms:
- Angular-radial v1:
- Angular-radial v2:
- Dynamic-gravity v1:
- Dynamic-gravity v2:
- Greedy v2:
==================================================
==================================================
Running Angular-radial v1 algorithm...
Description: Angular-radial v1
Parameters:
Completed in 0.0798 seconds
Route length: 519.29
==================================================
==================================================
Running Angular-radial v2 algorithm...
Description: Angular-radial v2
Parameters:
Completed in 0.0081 seconds
Route length: 519.29
==================================================
==================================================
Running Dynamic-gravity v1 algorithm...
Description: Dynamic-gravity v1
Parameters:
Completed in 0.0066 seconds
Route length: 495.87
==================================================
==================================================
Running Dynamic-gravity v2 algorithm...
Description: Dynamic-gravity v2
Parameters:
Completed in 0.0066 seconds
Route length: 495.87
==================================================
==================================================
Running Greedy v2 algorithm...
Description: Classic greedy TSP algorithm
Parameters:
Completed in 0.0015 seconds
Route length: 621.53
==================================================
============================================================================================================================
DETAILED ALGORITHM COMPARISON
============================================================================================================================
Algorithm | Time (s) | vs Best | Length | vs Best | Params
----------------------------------------------------------------------------------------------------------------------------
Greedy v2 | 0.0015 | BEST | 621.53 | +25.34% |
Dynamic-gravity v2 | 0.0066 | +331.67% | 495.87 | BEST | delta=0.5, fast_2opt_iter=100
Dynamic-gravity v1 | 0.0066 | +333.80% | 495.87 | BEST | delta=0.5, fast_2opt_iter=100
Angular-radial v2 | 0.0081 | +431.08% | 519.29 | +4.72% | sort_by=angle_distance, look_ahead=100, max_2opt_iter=100
Angular-radial v1 | 0.0798 | +5150.37% | 519.29 | +4.72% | sort_by=angle_distance, look_ahead=100, max_2opt_iter=100
============================================================================================================================
PERFORMANCE ANALYSIS:
- Fastest algorithm(s): Greedy v2 (0.0015 sec)
- Shortest route(s): Dynamic-gravity v1, Dynamic-gravity v2 (495.87 units)
==================================================
SMART TSP ALGORITHMS BENCHMARK
==================================================
Points: 100
Seed: 123
Generation: random
Post-opt: OFF
Algorithms:
- Angular-radial v1:
- Angular-radial v2:
- Dynamic-gravity v1:
- Dynamic-gravity v2:
- Greedy v2:
==================================================
==================================================
Running Angular-radial v1 algorithm...
Description: Angular-radial v1
Parameters:
Completed in 0.0812 seconds
Route length: 850.62
==================================================
==================================================
Running Angular-radial v2 algorithm...
Description: Angular-radial v2
Parameters:
Completed in 0.0086 seconds
Route length: 850.62
==================================================
==================================================
Running Dynamic-gravity v1 algorithm...
Description: Dynamic-gravity v1
Parameters:
Completed in 0.0071 seconds
Route length: 850.86
==================================================
==================================================
Running Dynamic-gravity v2 algorithm...
Description: Dynamic-gravity v2
Parameters:
Completed in 0.0071 seconds
Route length: 856.14
==================================================
==================================================
Running Greedy v2 algorithm...
Description: Classic greedy TSP algorithm
Parameters:
Completed in 0.0015 seconds
Route length: 1026.37
==================================================
=============================================================================================================================
DETAILED ALGORITHM COMPARISON
=============================================================================================================================
Algorithm | Time (s) | vs Best | Length | vs Best | Params
-----------------------------------------------------------------------------------------------------------------------------
Greedy v2 | 0.0015 | BEST | 1026.37 | +20.66% |
Dynamic-gravity v1 | 0.0071 | +367.32% | 850.86 | +0.03% | delta=0.5, fast_2opt_iter=100
Dynamic-gravity v2 | 0.0071 | +367.38% | 856.14 | +0.65% | delta=0.5, fast_2opt_iter=100
Angular-radial v2 | 0.0086 | +468.54% | 850.62 | BEST | sort_by=angle_distance, look_ahead=100, max_2opt_iter=100
Angular-radial v1 | 0.0812 | +5243.04% | 850.62 | BEST | sort_by=angle_distance, look_ahead=100, max_2opt_iter=100
=============================================================================================================================
PERFORMANCE ANALYSIS:
- Fastest algorithm(s): Greedy v2 (0.0015 sec)
- Shortest route(s): Angular-radial v1, Angular-radial v2 (850.62 units)
==================================================
SMART TSP ALGORITHMS BENCHMARK
==================================================
Points: 1001
Seed: 123
Generation: random
Post-opt: OFF
Algorithms:
- Angular-radial v1:
- Angular-radial v2:
- Dynamic-gravity v1:
- Dynamic-gravity v2:
- Greedy v2:
==================================================
==================================================
Running Angular-radial v1 algorithm...
Description: Angular-radial v1
Parameters:
Completed in 0.2555 seconds
Route length: 2545.21
==================================================
==================================================
Running Angular-radial v2 algorithm...
Description: Angular-radial v2
Parameters:
Completed in 0.1346 seconds
Route length: 2545.21
==================================================
==================================================
Running Dynamic-gravity v1 algorithm...
Description: Dynamic-gravity v1
Parameters:
Completed in 0.0321 seconds
Route length: 2837.78
==================================================
==================================================
Running Dynamic-gravity v2 algorithm...
Description: Dynamic-gravity v2
Parameters:
Completed in 0.0186 seconds
Route length: 2726.36
==================================================
==================================================
Running Greedy v2 algorithm...
Description: Classic greedy TSP algorithm
Parameters:
Completed in 0.0023 seconds
Route length: 2985.82
==================================================
================================================================================================================================
DETAILED ALGORITHM COMPARISON
================================================================================================================================
Algorithm | Time (s) | vs Best | Length | vs Best | Params
--------------------------------------------------------------------------------------------------------------------------------
Greedy v2 | 0.0023 | BEST | 2985.82 | +17.31% |
Dynamic-gravity v2 | 0.0186 | +695.63% | 2726.36 | +7.12% | delta=0.5, fast_2opt_iter=1001
Dynamic-gravity v1 | 0.0321 | +1269.12% | 2837.78 | +11.50% | delta=0.5, fast_2opt_iter=1001
Angular-radial v2 | 0.1346 | +5646.96% | 2545.21 | BEST | sort_by=angle_distance, look_ahead=1001, max_2opt_iter=1001
Angular-radial v1 | 0.2555 | +10808.60% | 2545.21 | BEST | sort_by=angle_distance, look_ahead=1001, max_2opt_iter=1001
================================================================================================================================
PERFORMANCE ANALYSIS:
- Fastest algorithm(s): Greedy v2 (0.0023 sec)
- Shortest route(s): Angular-radial v1, Angular-radial v2 (2545.21 units)
Disclaimer: Performance results shown are for clustered/random distributions. Results may vary based on spatial characteristics. Always evaluate algorithms on your specific problem domains.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file smart_tsp_solver-1.0.1.tar.gz.
File metadata
- Download URL: smart_tsp_solver-1.0.1.tar.gz
- Upload date:
- Size: 24.4 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.14.3
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
46f79ecf6298f974f5a34745d9aaa075d48c125f1ec8c111195d544ba4558b2f
|
|
| MD5 |
ec628c342771e5d1c3541d52a448721c
|
|
| BLAKE2b-256 |
44bb3b5151b9a449664e8099d69537fa39de087582ac4aa355342de27d00f722
|
File details
Details for the file smart_tsp_solver-1.0.1-py3-none-any.whl.
File metadata
- Download URL: smart_tsp_solver-1.0.1-py3-none-any.whl
- Upload date:
- Size: 20.8 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.14.3
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
9cb1640d9717f188b5e324fc04fea2ae5b331f380aa66a1da4cbf1bc77dcf6e3
|
|
| MD5 |
dcd31eae698149598b8984cd4837ce5a
|
|
| BLAKE2b-256 |
d56485d5ba9adc0394c193df96bfb59bb997a3a4604512e836ece4305b292e9c
|







