Generative AV testing environment for unknown unsafe events discovery

Project description

Generative Autonomous Vehicle Testing Environment for Unknown Unsafe Events Discovery
Website • Paper • Examples • Community




About
TeraSim is an open-source traffic simulation platform designed for naturalistic and adversarial testing of autonomous vehicles (AVs). It enables high-speed, AI-driven testing environment generation to expose AVs to both routine and rare, high-risk driving conditions.
Developed with researchers, AV developers, and regulators in mind, TeraSim is designed to better support ISO 21448 (SOTIF) and ISO 34502 compliance, providing a scalable, automated, and unbiased AV evaluation framework.
Built upon the open-source traffic simulation software SUMO (Simulation of Urban MObility), TeraSim extends its capabilities to provide specialized features for autonomous vehicle testing.
🎥 Demo Video
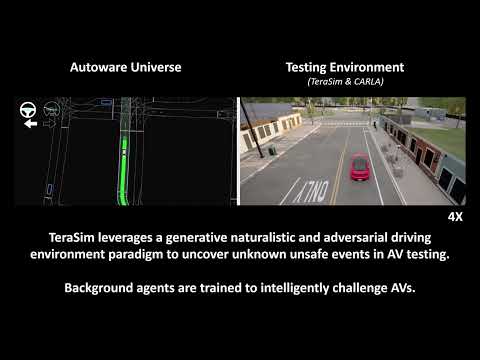
TeraSim is built upon a series of foundational academic works in autonomous vehicle testing:
-
NDE (Paper | Code): Learning naturalistic driving environment with statistical realism. Yan, X., Zou, Z., Feng, S., et al. Nature Communications 14, 2037 (2023).
-
NADE (Paper | Code): Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment. Feng, S., Yan, X., Sun, H. et al. Nature Communications 12, 748 (2021).
-
D2RL (Paper | Code): Dense reinforcement learning for safety validation of autonomous vehicles. Feng, S., Sun, H., Yan, X., et al. Nature 615, 620–627 (2023).
🌟 Key Features
✅ Generative Driving Environment Testing
→ Adaptive and interactive environments replace static, manually designed scenarios.
→ Automatically uncovers unknown unsafe events, enhancing AV safety validation.
→ Scalable and efficient, reducing manual effort while expanding test coverage.
✅ Naturalistic & Adversarial Driving Environments (NADE)
→ Real-world traffic behavior modeling based on large-scale naturalistic driving data.
→ Injects corner cases (e.g., jaywalking pedestrians, sudden lane changes) to rigorously test AV safety.
✅ Scalable & Automated AV Testing
→ AI-driven naturalistic and adversarial driving environment accelerates AV validation by 1,000x - 100,000x compared to real-world testing.
→ Dynamically adapts test cases to urban, highway, and mixed-traffic conditions.
✅ Seamless Integration with Third-Party Simulators
→ Works with CARLA, Autoware, and more.
→ API-driven design enables plug-and-play simulation for integration with third-party simulators.
✅ City-Scale AV Testing with TeraSim-Macro
→ Extends simulations from single intersections to entire cities, supporting policy-level AV impact analysis.
✅ Multimodal Inputs & AI-Assisted Environment Creation
→ TeraSim-GPT enables language-driven environment customization.
→ Define test cases in natural language: "Create a left-turn driving environment at a busy intersection."
🛠️ System Architecture
TeraSim is modular, allowing users to customize and extend simulations easily.

📌 Core Components:
- TeraSim: Base simulation engine for generating AV test environments.
- TeraSim-NDE-NADE: Realistic & adversarial driving environments for safety evaluation.
- Vehicle Adversities (e.g., aggressive cut-ins, emergency braking).
- VRU Adversities (e.g., jaywalking pedestrians, erratic cyclists).
- TeraSim-Service: RESTful API service built with FastAPI for seamless integration with popular simulators like CARLA and AWSim. Enables standardized communication and control.
- TeraSim-Macro (coming soon): Enables mesoscopic city-scale AV testing.
- TeraSim-Data-Zoo (coming soon): Repository for real-world driving data (Waymo, NuScenes, NuPlan).
- TeraSim-GPT (coming soon): AI-powered multimodal user input handling for environment customization.
📌 Plug-and-Play Compatibility:
✅ SUMO-based microsimulation
✅ CARLA & Autoware integration
✅ Real-world dataset support
🔧 Installation
Currently, TeraSim is under active development. Please install it from source using poetry (required) and Anaconda (optional).
conda create -n terasim python=3.10
conda activate terasim
git clone https://github.com/mcity/TeraSim.git
cd TeraSim
poetry install
🚀 Why TeraSim?
🔍 Uncover Hidden AV Risks
→ Dynamically generates realistic and adversarial traffic environments, identifying corner cases.
⚡ Automated & Scalable
→ Uses AI to generate simulations across cities, with 1000x faster testing efficiency than real-world methods.
🔗 Seamless Integration
→ Plugin-based design works with existing AV stacks & third-party simulators.
📢 Open-Source & Extensible
→ Encourages industry collaboration for safer, more reliable AV deployment.
Release history Release notifications | RSS feed

Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file terasim-0.1.0.tar.gz.
File metadata
- Download URL: terasim-0.1.0.tar.gz
- Upload date:
- Size: 44.8 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/1.8.3 CPython/3.10.14 Linux/5.15.167.4-microsoft-standard-WSL2
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
dd0ea832c10c0e4a1e2a85a4e3ece409a30574ca52326cea4f61e209ecffa197
|
|
| MD5 |
83f0e0471b28323fa0b1eb3f911355e3
|
|
| BLAKE2b-256 |
75fc0a58315f4d74e43ea227d2daa234549a9b0c5224aa73670bc3a6dd83a05c
|
File details
Details for the file terasim-0.1.0-py3-none-any.whl.
File metadata
- Download URL: terasim-0.1.0-py3-none-any.whl
- Upload date:
- Size: 60.5 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/1.8.3 CPython/3.10.14 Linux/5.15.167.4-microsoft-standard-WSL2
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
d6f489aa554b4df219659529ce23ee6a34cedbb3efccdf221330da414cce9cda
|
|
| MD5 |
917850959625c5586a0e92b906777ead
|
|
| BLAKE2b-256 |
b656d94ced00aa061c41c4a3479e5e6182337d5129455ae0744c9290dd8e343c
|







