SimPyLC PLC simulator, after its C++ big brother that has controlled industrial installations for more than 25 years now. ARDUINO CODE GENERATION ADDED!
=== Use the SimPyLC forum to share knowledge and ask questions about SimPyLC. ===
Simulate your PLC controls and controlled systems to save lots of commissioning time
PLC?
Real world industrial control systems DO NOT consist of a bunch of communicating sequential processes. Semaphores, threads and priority jugling are far too error prone to control anything else but a model railway. Most control systems are surprisingly simple, consisting of only one program loop that nevertheless seems to do many things in parallel and with reliable timing. Such a control system is called a PLC (Programmable Logic Controller) and all major industries rely on it. PLC’s control trains, cranes, ships and your washing machine.
What SimPyLC is not
SimPyLC does not attempt to mimic any particular PLC instruction set or graphical representation like ladder logic or graphcet. There are enough tools that do. Anyone with experience in the field and an IT background knows that such archaic, bulky, hard to edit representations get in the way of clear thinking. By the way, graphcet is stateful per definition, which is the absolute enemy of safety. Though its bigger brother written in C++ according to exactly the same principles has been reliably controlling container cranes, grab unloaders and production lines for more than 20 years now, SimPyLC is FUNDAMENTALLY UNSUITABLE for controlling real world systems and should never be used as a definitive validation of anything. You’re only allowed to use SimPyLC under the conditions specified in the qQuickLicence that’s part of the distribution.
What it is
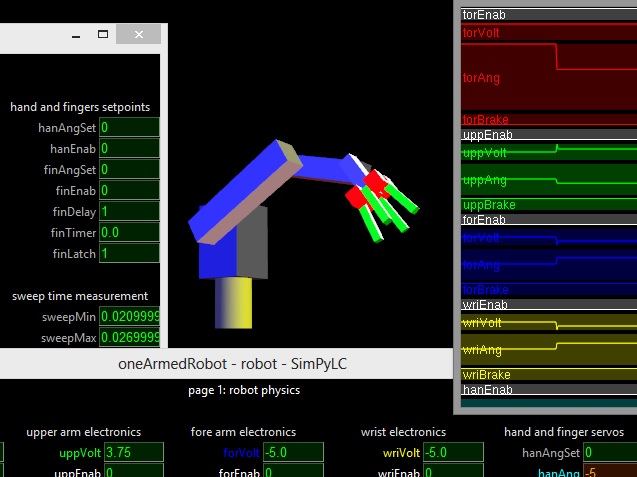
SimPyLC functionally behaves like a PLC or a set of interconnected PLC’s and controlled systems. It is a very powerful tool to gain insight in the behaviour of real time controls and controlled systems. It allows you to force values, to freeze time, to draw timing charts and to visualize your system. This is all done in a very simple and straightforward way. But make no mistake, simulating systems in this way has a track record of reducing months of commissioning time to mere days. SimPyLC is Form Follows Function at its best, it does what it has to do in a robust no-nonsense way. Its sourcecode is tiny and fully open to understanding. The accompanying document SimPyLCHowTo condenses decenia of practical experience in control systems in a few clear design rules that can save you lots of trouble and prevent accidents. In addition to this SimPyLC can generate C code for the Arduino processor boards.
SimPyLC is able to generate C code for Arduino processor boards, making Arduino development MUCH easier
So
Are you looking for impressive graphics: Look elsewhere. Do you want to gain invaluable insight in real time behaviour of controls and control systems with minimal effort: Use SimPyLC, curse at its anachronistic simplicity and grow to love it more and more.
What’s new
Command line tool splc made available
Parameter attitude added to Thing.__call__ to be able to use rotation matrix rather than Euler angles
Document simpylc_howto updated and renamed to pothole case
Boolean circuits can now be switched by pressing the mousewheel
Registers can now be altered by rotating the mousewheel
Rocket example added with physically correct moment of inertia to demonstrate e.g. precession
Some parameters added and some renamed to make Thing.__call__ more consistent
Function tEva added to evaluate 3D tuples
Quaternion module added to accurately model rotational movement
Cones and Ellipsoids added
Optional moving camera added with synchroneous caching for accurate tracking
Pure Python controls added, just using the simulator to test without actual controlled hardware
REMARK: All complete Arduino examples were tested on the Arduino Due, since that’s the one I own, but they should run on the One with only slight I/O modifications (PWM instead of true analog output, using a shift register if you run short of I/O pins etc.)
Bugs fixed
No known bugs currently
Bug reports and feature requests are most welcome and will be taken under serious consideration on a non-committal basis
Installation
Installation for Windows, Linux and OSX is described in SimPyLCHowTo.
Usage
Go to directory SimPyLC/simulations/oneArmedRobot
Click on world.py or run world.py from the command line
GUI Operation
[LEFT CLICK] on a field or [ENTER] gets you into edit mode.
[LEFT CLICK] or [ENTER] again gets you out of edit mode and into forced mode, values coloured orange are frozen.
[RIGHT CLICK] or [ESC] gets you into released mode, values are thawed again.
[PGUP] and [PGDN] change the currently viewed control page.
[WHEEL PRESSED] on a marker field makes it 1, release makes it 0 again, both without freezing it.
[WHEEL ROTATION] changes the value of a register field, without freezing it.
For a test run of oneArmedRobot
Enter setpoints in degrees for the joint angles (e.g. torAngSet for the torso of the robot) on the movement control page.
After that set ‘go’ to 1 and watch what happens.
If you want to experiment yourself, read SimPyLCHowTo
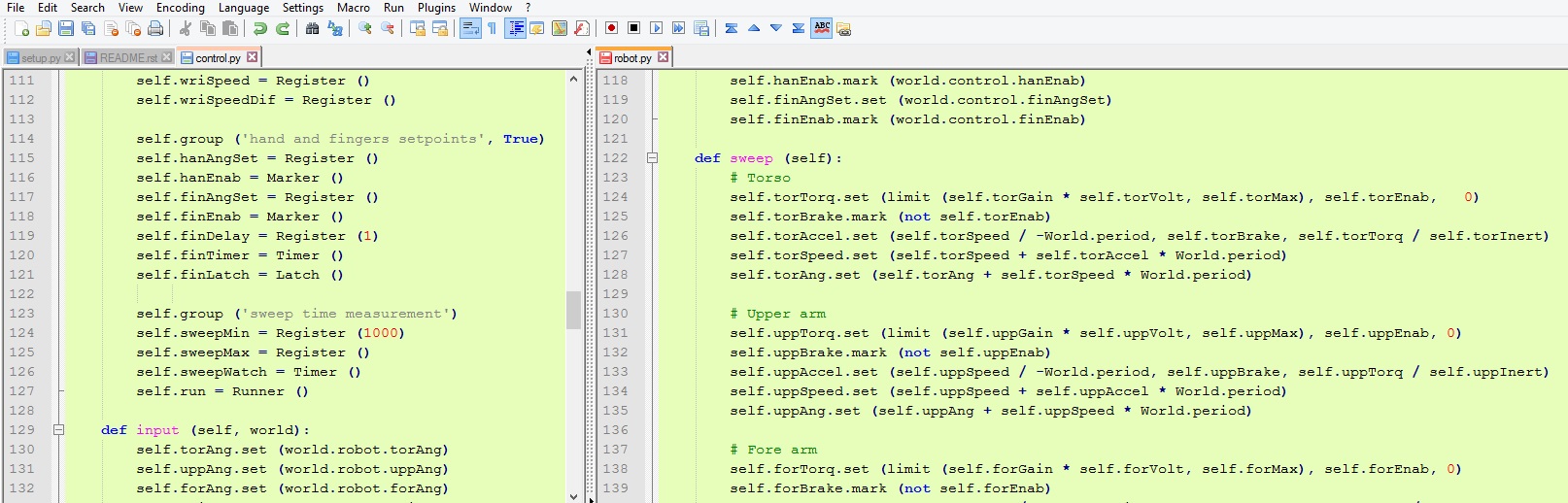
Coding is text oriented, enabling simple and fast editing, but functional behaviour resembles circuit logic, with elements like markers, timers, oneshots, latches and registers
This license governs use of the accompanying software (“Software”), and your use of
the Software constitutes acceptance of this license.
You may use the Software for any commercial or noncommercial purpose, including
distributing derivative works.
In return, it is required that you agree:
Not to remove any copyright or other notices from the Software.
That if you distribute the Software in source code form you do so only under
this license (i.e. you must include a complete copy of this license with your
distribution in a plain text file named QQuickLicence.txt),
and if you distribute the Software solely in object form
you only do so under a license that complies with this license.
That the Software comes “as is”, with no warranties. None whatsoever. This
means no express, implied or statutory warranty, including without limitation,
warranties of merchantability or fitness for a particular purpose or any
warranty of title or non-infringement. Also, you must pass this disclaimer on
whenever you distribute the Software or derivative works.
That neither Geatec Engineering nor any contributor to the Software will be liable for any
of those types of damages known as indirect, special, consequential, or
incidental related to the Software or this license, to the maximum extent the law
permits, no matter what legal theory it’s based on. Also, you must pass this
limitation of liability on whenever you distribute the Software or derivative
works.
That you will not use or cause usage of the Software in safety-critical situations
under any circumstances.
That if you sue anyone over patents that you think may apply to the Software for a
person’s use of the Software, your license to the Software ends automatically.
That your rights under this License end automatically if you breach it in any way.
That all rights not expressly granted to you in this license are reserved.