Python interface for the automatic data acquisition of spectral data.

Project description
Automatic spectral acquisition
Python command line interface for the automatic data acquisition of spectral data. Connects to an Arduino running a custom program and to an oscilloscope.
Setup
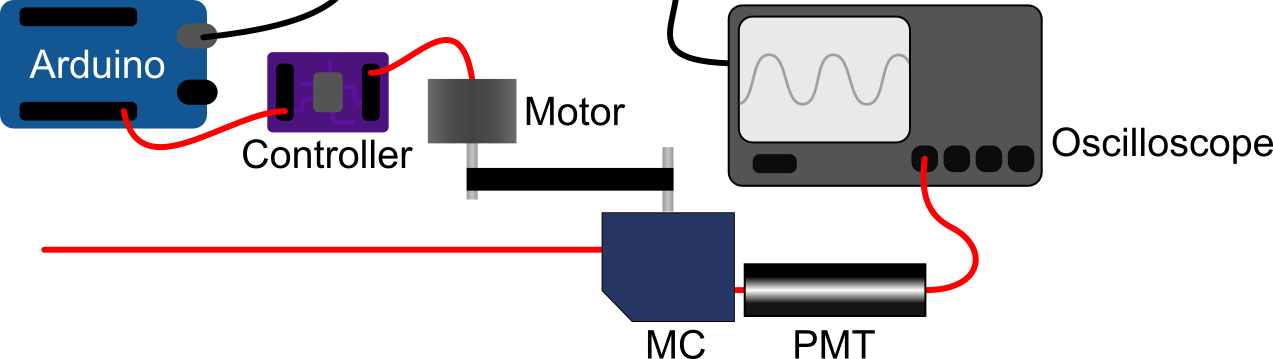
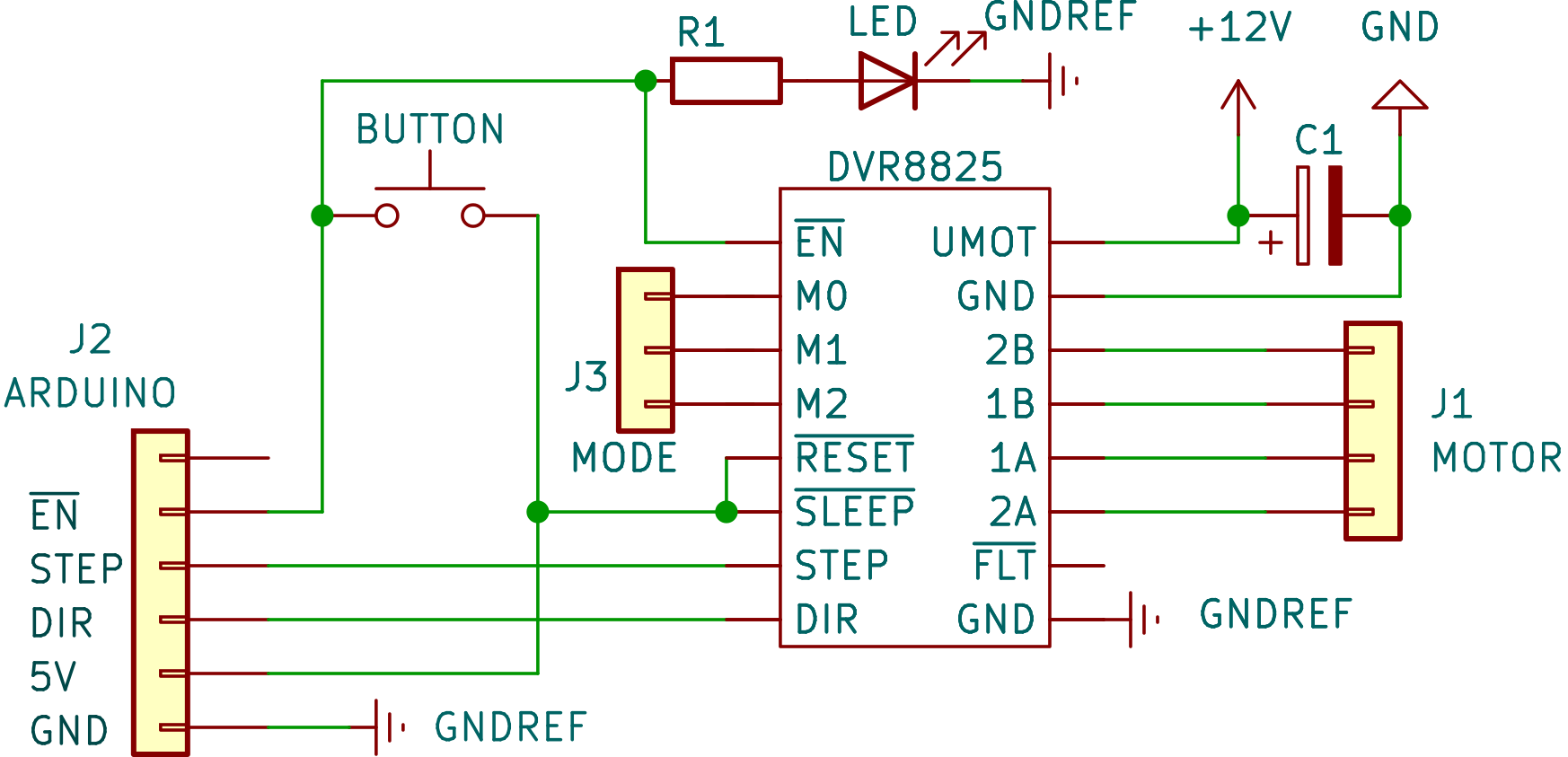
An Arduino running the code on arduino_code.ino is connected to a stepper motor controller (using a DVR8825 breakout board driver). The stepper motor is connected to a manual monochromator with a timing belt and two gears.
For the detection, a PMT is connected to an oscilloscope.
Both of these components can then be controlled using this CLI.
The diagram for the stepper motor controller is shown next.
Installation
Install using
pip install automatic-spectral-acquisition
Calibration process
An initial calibration is necessary for setting the DEFAULT_POSITION (default=0) and CALIBRATION_POSITIONS in automatic_spectral_acquisition\constants.py. This calibration has to be done manually for now, and requires the user to choose a set of points that will be used for further calibrations:
- Define a default position and a default wavelength. Ideally
DEFAULT_POSITION=0and a wavelength in the middle of the available range, e.g., 650 nm. - Select a set of wavelengths (e.g.: [350, 500, 650, 800, 950] nm)
- Manually set the monochromator to the default wavelength and start the Arduino code.
- Find the associated position by trial and error with
spectral moveto <position>. Use these values to populateCALIBRATION_POSITIONS.
As long as the following measurements conclude successfully, redefining these constants won't be necessary. Even if there is some problem and the motor doesn't return to the default position, if DEFAULT_POSITION=0, the monochromator can be manually set to the default wavelength associated with the default position to return to normal functionality.
After that, the calibration process can be performed using, e.g., spectral config calibrate. The motor will be moved to the set positions and the user will be asked to input the current wavelength value.
At the end of a measurement, the motor will return to the default position to guarantee the correct behaviour of further measurements.
The calibration parameters are saved to a file and can be reused for every measurement. However, it is recommended to recalibrate the system every session.
How to use
To call the program, use the command spectral.
To get help using the CLI, use the command spectral --help or spectral <subcommand> --help.
To create a configuration file use
spectal config create
You will be asked to select the serial ports for the Arduino and oscilloscope, as well as, to calibrate the stepper motor.
If a configuration file already exists, you can choose to just re-calibrate the stepper motor using
spectral config calibrate
You can see the current configuration using
spectral config show
Or delete it using
spectral config delete
To record a spectrum use
spectral spectrum <start> <end> <step> [options]
<start>is the wavelength of the start of the spectrum<end>is the wavelength of the end of the spectrum<step>is the space between measurements
[options] can contain:
-n <number of measurements>is used to select how many measurements are taken and averaged for each wavelength-f <name of output file>is used to change the name of the output file-pif this options is present, the spectrum will be plotted at the end of acquisition
You can also take a single measurement using
spectral single <wavelength> [options]
[options] can contain:
-n <number of measurements>is used to select how many measurements are taken and averaged for each wavelength-f <name of output file>is used to change the name of the output file-pif this options is present, the values measured will be printed on the terminal
Use
spectral single <wavelength> [options]
to perform continuous measurements that are printed on the screen.
[options] can contain:
-d <delay>changes the delay (in seconds) between measurements.


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file automatic_spectral_acquisition-0.1.4.tar.gz.
File metadata
- Download URL: automatic_spectral_acquisition-0.1.4.tar.gz
- Upload date:
- Size: 14.6 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/1.8.3 CPython/3.12.4 Windows/11
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
008f8ee46553ef7680bdf0a333bdf350c57fe1ac42c4c945e6ad83a4cc136ff4
|
|
| MD5 |
ea4c8df2a0fca3dd6603523a37949d29
|
|
| BLAKE2b-256 |
49a7b5e12a1bb6481a9156b984e75c9e8d37eadf5397e53f507909ffc5b5b027
|
File details
Details for the file automatic_spectral_acquisition-0.1.4-py3-none-any.whl.
File metadata
- Download URL: automatic_spectral_acquisition-0.1.4-py3-none-any.whl
- Upload date:
- Size: 19.2 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/1.8.3 CPython/3.12.4 Windows/11
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
75040962733688bcb455c81bc633aebdeff61b69fd10a8320a9f81f6deadef1b
|
|
| MD5 |
acf03c82ee72d2beccf189931da6f270
|
|
| BLAKE2b-256 |
ca3ba4e090a6fe401140d451012e3728105956e043f16eefa7b2e9c42b09f54b
|







