Python driver for DaMiao motors

Project description
DaMiao Motor Python Driver





Python driver for DaMiao brushless motors over CAN with a unified CLI, web GUI, and library API.
Quick links
| Resource | Link |
|---|---|
| Documentation home | GitHub Pages docs |
| Control modes and control laws | Motor Control Modes |
| API reference | DaMiaoController API |
| Firmware reference | DaMiao motor firmware (Gitee) |
| Source code | GitHub repository |
Highlights
- Control modes:
MIT,POS_VEL,VEL,FORCE_POS - Typical motor types:
3507,4310,4340,6006,8006,8009,10010/L - Unified CLI:
damiao scan,send-cmd-*, register tools, anddamiao gui - Python API for multi-motor control with continuous feedback polling
Installation
pip install damiao-motor
Requirements: Linux + CAN interface (socketcan on can0, etc.). Set CAN bitrate to match your motor before running commands.
Quick start
Safety: these examples can move hardware. Secure the motor and keep clear of moving parts.
python examples/example.py
Edit examples/example.py to set motor_id, feedback_id, motor_type, and channel.
from damiao_motor import DaMiaoController
controller = DaMiaoController(channel="can0", bustype="socketcan")
motor = controller.add_motor(motor_id=0x01, feedback_id=0x00, motor_type="4340")
controller.enable_all()
motor.ensure_control_mode("MIT")
motor.send_cmd_mit(
target_position=1.0,
target_velocity=0.0,
stiffness=20.0,
damping=0.5,
feedforward_torque=0.0,
)
state = motor.get_states()
print(state["pos"], state["vel"], state["torq"])
controller.shutdown()
Control laws
MIT mode (impedance control)

T_ref = Kp * (p_des - theta_m) + Kd * (v_des - dtheta_m) + tau_ff
iq_ref = T_ref / K_T
id_ref = 0
Full mode documentation:
CLI commands
All damiao subcommands require --motor-type (example: 4340).
| Command | Purpose |
|---|---|
damiao scan --motor-type 4340 |
Scan bus for motors |
damiao send-cmd-mit --motor-type 4340 --id 1 |
MIT command |
damiao send-cmd-pos-vel --motor-type 4340 --id 1 |
POS_VEL command |
damiao send-cmd-vel --motor-type 4340 --id 1 |
VEL command |
damiao send-cmd-force-pos --motor-type 4340 --id 1 |
FORCE_POS command |
damiao set-zero-command --motor-type 4340 --id 1 |
Zero hold command |
damiao set-zero-position --motor-type 4340 --id 1 |
Set current position to zero |
damiao set-can-timeout --motor-type 4340 --id 1 --timeout-ms 1000 |
Set CAN timeout (reg 9) |
damiao set-motor-id / damiao set-feedback-id |
Change IDs (reg 8 / reg 7) |
damiao gui |
Launch web GUI |
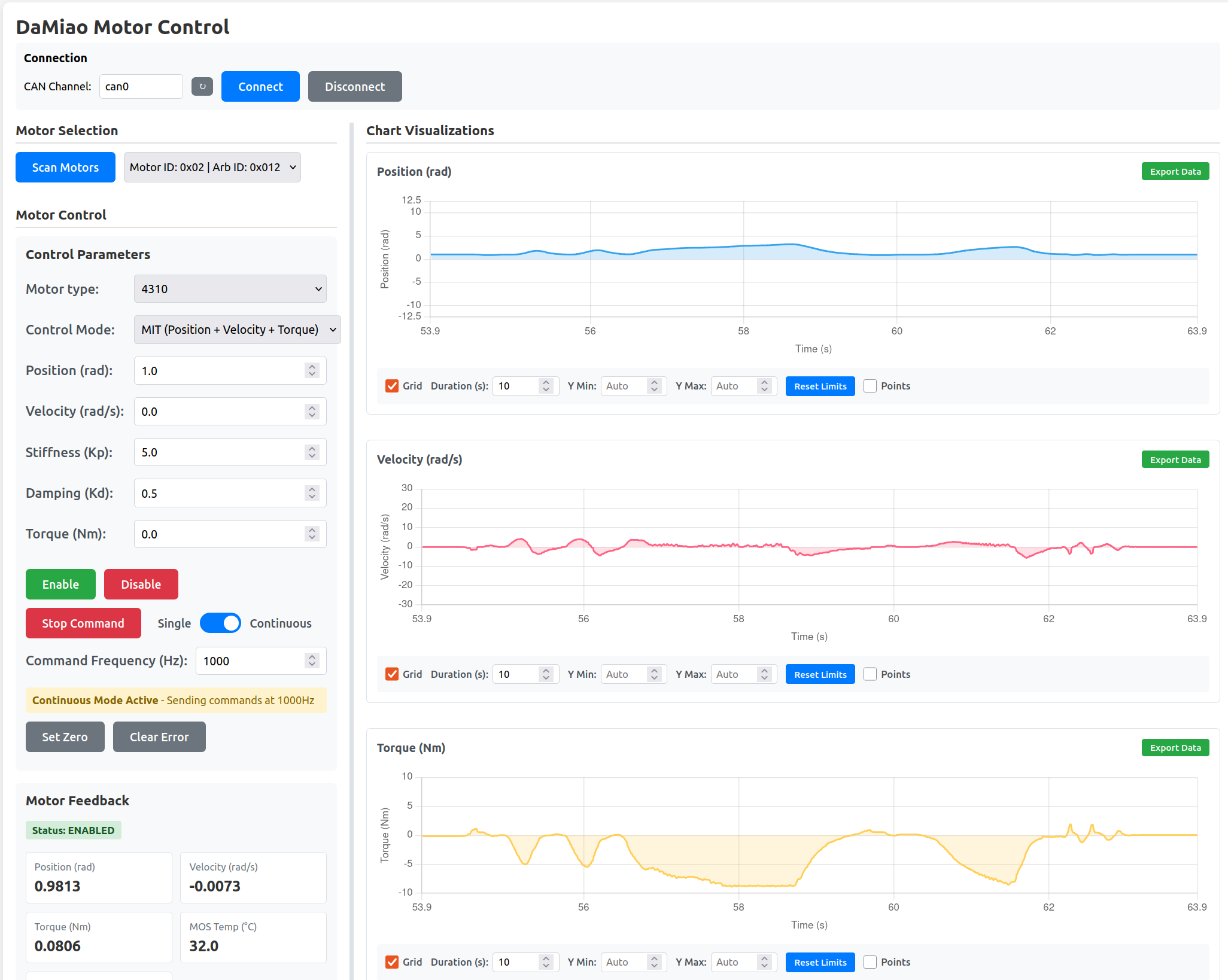
Web GUI
damiao gui
Open the local web UI (default to http://127.0.0.1:5000).
GUI docs: Web GUI guide
API reference
DaMiaoController(channel, bustype)controller.add_motor(motor_id, feedback_id, motor_type)motor.ensure_control_mode(mode)motor.send_cmd_mit(...)motor.send_cmd_pos_vel(...)motor.send_cmd_vel(...)motor.send_cmd_force_pos(...)motor.send_cmd(...)motor.get_states()motor.get_register(...)/motor.write_register(...)
API docs:
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file damiao_motor-1.0.7b1.tar.gz.
File metadata
- Download URL: damiao_motor-1.0.7b1.tar.gz
- Upload date:
- Size: 1.1 MB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.11.14
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
e09702490344c19e9ee1894b85a82b40c36b88d390f935921c7a662169f630ba
|
|
| MD5 |
2283c9a25d462e6d46288eac68c3151d
|
|
| BLAKE2b-256 |
15463c79357682348f5a4e2ca654a66c124e3720fa9da41e048e4916c632e3e7
|
File details
Details for the file damiao_motor-1.0.7b1-py3-none-any.whl.
File metadata
- Download URL: damiao_motor-1.0.7b1-py3-none-any.whl
- Upload date:
- Size: 67.2 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.11.14
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
5e6cfc51f6da36c4f2ad3a9eb07a8043fd96134b1ac729d9aad9860f112df0dc
|
|
| MD5 |
42fcde48b3441c55c79a66979c31555f
|
|
| BLAKE2b-256 |
ab6e1945d55760d187298a035626b987fcac26dea9f2341f953cba2bc7366bdb
|







