Generate an optimized flight plan for aerial mapping with drones.

Project description
Drone Flightplan Generator

Generate an optimized flight plan for aerial mapping with drones.



📖 Documentation: https://hotosm.github.io/drone-flightplan/
🖥️ Source Code: https://github.com/hotosm/drone-tm/blob/develop/src/backend/packages/drone-flightplan
Overview
The Drone Flightplan Generator is a Python package designed to automate the creation of flight plans for drones. This tool is essential for users needing efficient and precise aerial surveys, mapping, and imagery collection.
Waypoint File
DJI drones require waypoint files. WPML route files all end with a ".kmz" suffix and are essentially archive files packed in ZIP format. After decompression of a standard WPML route file, its file structure is as follows:
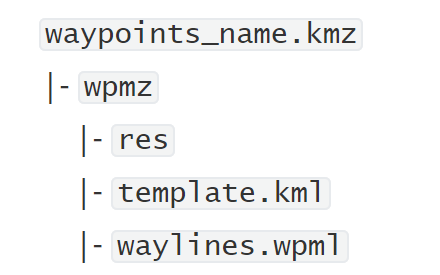
For more details, check the DJI Cloud API documentation.
Installation
To install the package, use pip:
pip install drone-flightplan
Modules
1. calculate_parameters
This module helps in calculating various parameters required for the flight plan, such as:
calculate_parameters(
forward_overlap: float,
side_overlap: float,
agl: float,
gsd: float = None,
image_interval: int = 2,
)
Parameters:
AGL(Altitude above ground level in meters) = 115Forward overlap= 75Side overlap= 75
Fixed Parameters:
Image interval= 2 secVertical FOV= 0.99Horizontal FOV= 1.25
Calculations:
- Forward Photo height = AGL _Vertical_FOV
- Side Photo width = AGL _Horizontal_FOV
- Forward overlap distance = Forward photo height _Forward overlap
- Side overlap distance = Side photo width _Side overlap
- Forward spacing = Forward photo height - Forward overlap distance
- Side spacing = Side photo width - Side overlap distance
- Ground speed = Forward spacing / Image interval
Parameters:
waypoints_geojson: The waypoint coordinates to be included in the flight plan mission.parameters: The drone flight parameters in JSON format.
2. create_waypoint
This module generates waypoints for a given project area, using parameters such as altitude, GSD, overlap ratios, and the option to avoid no-fly zones. It can also create 3D waypoints:
from drone_flightplan import create_waypoint
create_waypoint(
project_area,
agl,
gsd,
forward_overlap,
side_overlap,
rotation_angle=0.0,
generate_each_points=False,
generate_3d=False,
no_fly_zones=None,
take_off_point=None,
)
Parameters:
project_area(dict): A GeoJSON dictionary representing the project area (Polygon AOI).agl(float): Altitude above ground level (the height at which the drone will fly).gsd(float): Ground Sampling Distance (resolution of the images captured).forward_overlap(float): Desired forward overlap percentage for the images in the flight plan.side_overlap(float): Desired side overlap percentage for the images in the flight plan.rotation_angle(float, optional): The rotation angle for the flight grid in degrees (default is 0.0).generate_each_points(bool, optional): True to generate individual waypoints, False to generate waylines connecting waypoints for a continuous flight path.generate_3d(bool, optional): True to capture 3D images at −90°, −45°, and 45° lateral angles, False to capture only 2D images.no_fly_zones(dict, optional): A GeoJSON dictionary representing no-fly zones (areas to avoid).take_off_point(list[float], optional): The GPS coordinates of the take-off point [longitude, latitude] for the flight.
3. add_elevation_from_dem
This module integrates elevation data from Digital Elevation Models (DEMs) into the flight plan to account for changes in terrain. This ensures more accurate waypoint positioning for varying altitudes:
from drone_flightplan import add_elevation_from_dem
add_elevation_from_dem(raster_file, points, outfile)
Parameters:
raster_file: Path to the DEM GeoTIFF file.points: GeoJSON string with point coordinates.outfile: Path for saving the output with added elevation.
4. create_placemarks
This module creates placemarks for the flight plan, useful for marking key locations:
from drone_flightplan import create_placemarks
create_placemarks(
waypoints_geojson: Union[str, FeatureCollection, dict],
parameters: dict
)
5. create_wpml
This module is responsible for creating WPML files (Waypoint Markup Language), which are often used for visualizing waypoints and flight paths in different tools or simulators:
from drone_flightplan import create_wpml
create_wpml(
placemark_geojson: Union[str, FeatureCollection, dict],
output_file_path: str = "/tmp/",
)
Parameters:
placemark_geojson: The placemark coordinates to be included in the flight plan mission.output_file_path: The output file path for the WPML file.
6. create_flightplan
This is the core function responsible for generating a complete flight plan for a specified area of interest (AOI):
from drone_flightplan import create_flightplan
create_flightplan(
aoi,
forward_overlap,
side_overlap,
agl,
gsd=None,
image_interval=2,
dem=None,
outfile=None,
generate_each_points=False,
rotation_angle=0.0,
take_off_point=None,
)
Parameters:
aoi: The area of interest in GeoJSON format.forward_overlap(float): Desired forward overlap percentage for the images.side_overlap(float): Desired side overlap percentage for the images.agl(float): Altitude above ground level (in meters) for drone flight.gsd(float, optional): Ground sampling distance in cm/px. If not provided, it will be calculated based on the altitude.image_interval(int, optional): Time interval (in seconds) between two consecutive image captures.dem(str, optional): Path to the Digital Elevation Model (DEM) file to add terrain elevation data to the flight plan.outfile(str, optional): The output file path where the resulting flight plan will be saved. If not provided, the flight plan is returned as a string.generate_each_points(bool, optional): True to generate individual waypoints for flight, False to generate waylines.rotation_angle(float, optional): The rotation angle (in degrees) for the flight grid. Default is 0.0.take_off_point(list[float], optional): A list of GPS coordinates [longitude, latitude] for the takeoff point.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file drone_flightplan-0.4.0.tar.gz.
File metadata
- Download URL: drone_flightplan-0.4.0.tar.gz
- Upload date:
- Size: 44.5 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: uv/0.8.22
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
379aa72e0a83789fccfac44586a05f895393d8d925c446db64bd66aef129cfb1
|
|
| MD5 |
02d6058938c43b54c24226b1cbe667dc
|
|
| BLAKE2b-256 |
4dc45c82353fbfe44e596c0ab7c89b20650f858e4fa6d465f919d53d87ce258c
|
File details
Details for the file drone_flightplan-0.4.0-py3-none-any.whl.
File metadata
- Download URL: drone_flightplan-0.4.0-py3-none-any.whl
- Upload date:
- Size: 49.7 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: uv/0.8.22
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
da126ec4371a91a26cf9dfd7773b1142f39eedaa2ab68584d8e62b13bcdfe09b
|
|
| MD5 |
02887f0d9777453abc3b3225763c1200
|
|
| BLAKE2b-256 |
4e91a93f085e357f897322c558430da648c8e078bd6661ea411b85b5b675ed81
|







