A hard-constrained neural network framework that enforces nonlinear equality and inequality constraints at inference time via adaptive-depth neural projection.


Project description
ENFORCE - Nonlinear Constrained Learning with Adaptive-depth Neural Projection

Nonlinear Constrained Learning with Adaptive-depth Neural Projection.
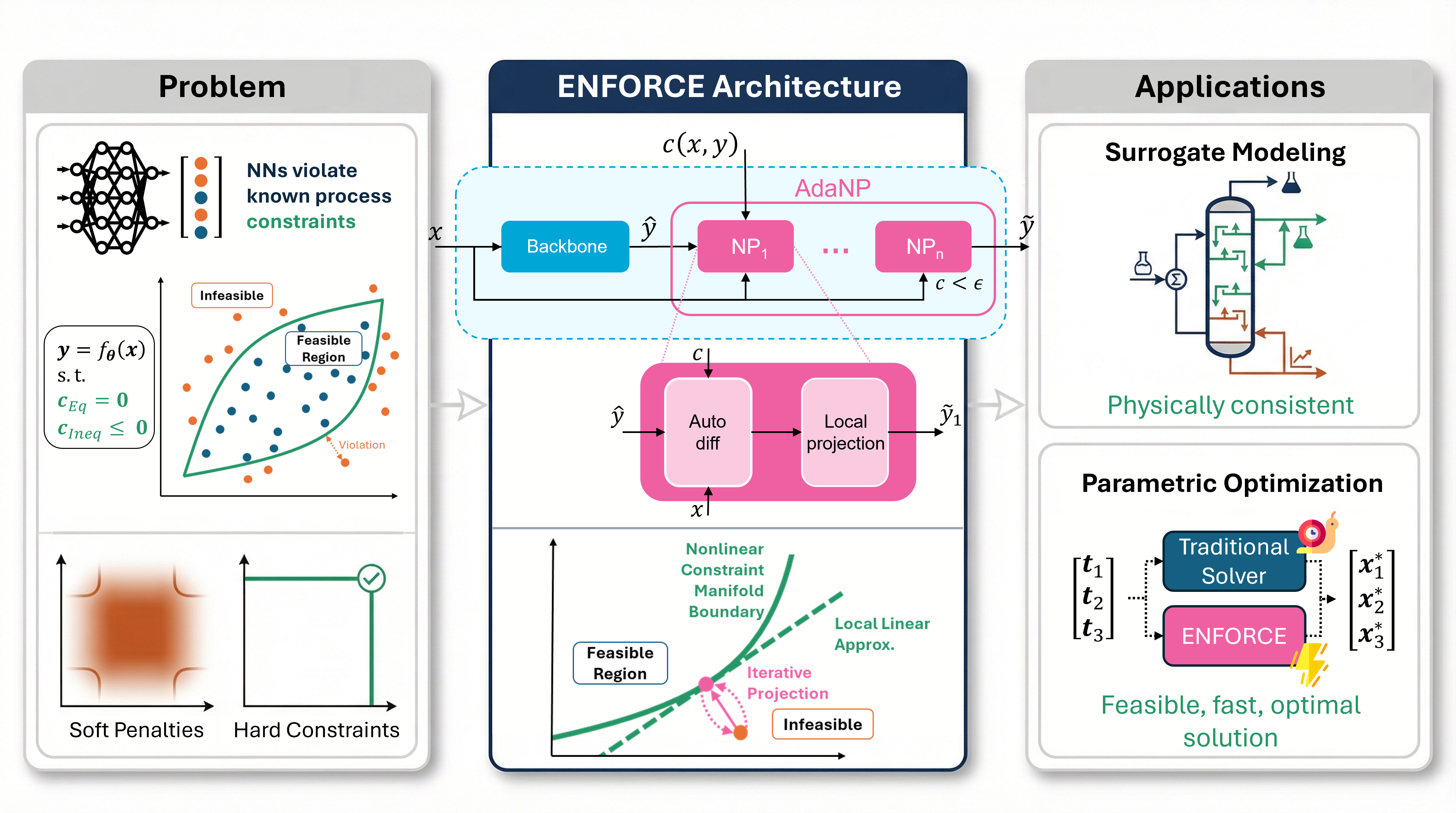
ENFORCE combines a neural network backbone with an AdaNP (Adaptive-depth Neural Projection) module to drive predictions toward feasibility with respect to nonlinear equality and inequality constraints. At each forward pass, AdaNP iteratively applies a linearize-and-project correction - an SQP-inspired Gauss-Newton step - until the constraint residual falls below a prescribed tolerance ε.
For constraints that are affine in the output y, a single NP step achieves exact feasibility. For general nonlinear constraints, ε-feasibility is obtained locally: under standard regularity conditions (LICQ, C² smoothness) and when the backbone prediction is sufficiently close to the constraint manifold, AdaNP reduces the residual ‖c(x,ỹ)‖ below ε with a linear convergence rate. The model is trained with standard unconstrained optimization (Adam), not constrained solvers.
Inequality constraints g(x,y) ≤ 0 are handled via a Fischer-Burmeister (FB) reformulation that converts them into equalities in an extended output space [y, λ], so the same AdaNP projection applies without modification.
Reference
If you use ENFORCE in your work, please cite the paper:
@Article{Lastrucci2025_ENFORCENonlinearConstrained,
author = {Lastrucci, Giacomo and Schweidtmann, Artur M.},
journal = {arXiv preprint arXiv:2502.06774},
title = {ENFORCE: Nonlinear Constrained Learning with Adaptive-depth Neural Projection},
year = {2025},
copyright = {arXiv.org perpetual, non-exclusive license},
doi = {https://doi.org/10.48550/arXiv.2502.06774},
keywords = {Machine Learning (cs.LG), FOS: Computer and information sciences},
publisher = {arXiv},
}
Installation
pip
pip install enforce-nn
PyTorch must be installed separately for your hardware (CPU or CUDA):
# CPU
pip install torch --index-url https://download.pytorch.org/whl/cpu
# CUDA - see https://pytorch.org/get-started/locally/ for the right command
uv
uv add enforce-nn
By default this resolves PyTorch from the CPU index (configured in pyproject.toml). For CUDA, install PyTorch manually following the PyTorch installation guide and override the source entry.
From source
git clone https://github.com/giacomolastrucci/ENFORCE
cd ENFORCE
pip install -e .
# or
uv sync
Quick start
Supervised - nonlinear equality constraint
Fit x → (y₁, y₂) subject to the nonlinear constraint (0.5 y₁)² + x² + y₂ = 0:
import torch
import numpy as np
from enforce import ENFORCEConfig, ENFORCE
from enforce.engines.train import Trainer, TrainingConfig
from enforce.engines.evaluate import Evaluator, EvaluationConfig
from enforce.data.data_utils import generate_data, scale_data
# 1. Data
x_train, y_train = generate_data([...], n=500)
x_test, y_test = generate_data([...], n=200)
x_tr_s, y_tr_s, x_te_s, y_te_s, sp = scale_data(x_train, y_train, x_test, y_test)
# 2. Constraint c(x, y) -> [BS, NC] (operates on unscaled x and y)
def my_constraint(x, y):
return ((0.5 * y[:, 0])**2 + x[:, 0]**2 + y[:, 1]).unsqueeze(1)
# 3. Build
scaling_input = (torch.tensor(sp["input_mean"]), torch.tensor(sp["input_std"]))
scaling_output = (torch.tensor(sp["output_mean"]), torch.tensor(sp["output_std"]))
cfg = ENFORCEConfig(input_neurons=1, output_neurons=2, hidden_neurons=64,
hidden_layers=1, training_tolerance=1e-4,
inference_tolerance=1e-6, max_it=100,
supervised=True, weight_loss_displacement=0.5)
model = ENFORCE(scaling_input=scaling_input, scaling_output=scaling_output,
c=my_constraint, config=cfg, constrained=True, weighting_option=1)
# 4. Train / evaluate (do NOT wrap in torch.no_grad() - AdaNP needs autograd)
x_tr_t = torch.tensor(x_tr_s, dtype=torch.float32)
y_tr_t = torch.tensor(y_tr_s, dtype=torch.float32)
x_te_t = torch.tensor(x_te_s, dtype=torch.float32)
y_te_t = torch.tensor(y_te_s, dtype=torch.float32)
model = Trainer(model, TrainingConfig(epochs=2000)).fit(x_tr_t, y_tr_t)
result = Evaluator(model, EvaluationConfig()).evaluate(x_te_t, y_te_t, sp)
preds = result.predictions # shape [N, 2], already unscaled
Self-supervised - parametric optimization with inequality
For each x ∈ [2, 4], minimize ‖y‖² subject to y₁² + y₂ = x (equality) and y₁ ≥ 0 (inequality via FB):
import torch, torch.nn as nn, numpy as np
from enforce import ENFORCEConfig, ENFORCE
from enforce.fb_inequality_constraints import FischerBurmeisterReformulation
from enforce.engines.train import Trainer, TrainingConfig
from enforce.engines.evaluate import Evaluator, EvaluationConfig
from enforce.data.data_utils import scale_data
# 1. Constraints
def parabola(x, y): return (y[:, 0]**2 + y[:, 1] - x[:, 0]).unsqueeze(1)
def g_nonneg(x, y): return -y[:, 0] # y1 >= 0 => g = -y1 <= 0
fb = FischerBurmeisterReformulation(n_original_outputs=2, inequalities=[g_nonneg])
def c_full(x, y_ext): # NC=2 <= NO=3 ✓
y = y_ext[:, :2]
return torch.cat([parabola(x, y), fb(x, y_ext)], dim=1)
# 2. SSL objective - minimize ||y||²
class MinNorm(nn.Module):
def forward(self, x, y_ext):
return torch.mean(torch.sum(y_ext[:, :2]**2, dim=1))
# 3. Dummy labels (no targets needed in self-supervised mode)
N = 2000
x_train = np.random.uniform(2.0, 4.0, (N, 1)).astype(np.float32)
y_dummy = fb.extend_outputs(np.zeros((N, 2), dtype=np.float32))
x_tr_s, y_tr_s, _, _, sp = scale_data(x_train, y_dummy, x_train, y_dummy)
scaling_input = (torch.tensor(sp["input_mean"]), torch.tensor(sp["input_std"]))
scaling_output = (torch.tensor(sp["output_mean"]), torch.tensor(sp["output_std"]))
# 4. Build - output_neurons=fb.no (network predicts y only; λ appended in forward())
cfg = ENFORCEConfig(input_neurons=1, output_neurons=fb.no, hidden_neurons=64,
hidden_layers=2, training_tolerance=1e-4,
inference_tolerance=1e-6, max_it=100,
supervised=False, weight_loss_displacement=0.5)
model = ENFORCE(scaling_input=scaling_input, scaling_output=scaling_output,
c=c_full, fb=fb, ssl_loss=MinNorm(), config=cfg,
constrained=True, weighting_option=1)
# 5. Train / evaluate
x_tr_t = torch.tensor(x_tr_s, dtype=torch.float32)
y_tr_t = torch.tensor(y_tr_s, dtype=torch.float32)
model = Trainer(model, TrainingConfig(epochs=2000, n_original_outputs=fb.no)).fit(x_tr_t, y_tr_t)
result = Evaluator(model, EvaluationConfig(
n_original_outputs=fb.no, inequalities=fb.inequalities
)).evaluate(x_tr_t, y_tr_t, sp)
preds = fb.extract_outputs(result.predictions) # [N, 2] - y1, y2 only
Tutorials
Step-by-step notebooks in the notebooks/tutorials/ folder:
| Notebook | Topic |
|---|---|
01_equality_constraints.ipynb |
Supervised fitting with a nonlinear equality constraint (unit circle) |
02_inequality_constraints.ipynb |
Supervised fitting with inequality bounds via Fischer-Burmeister |
03_parametric_optimization.ipynb |
Self-supervised parametric optimization - mixed equality + inequality, MLP comparison |
How it works
ENFORCE appends an AdaNP module to any backbone network. Each NP layer solves a linearized QP: given the backbone output ŷ and the constraint Jacobian B = ∂c/∂y|_{x,ŷ}, the closed-form correction step is
ỹ = (I − Bᵀ(BBᵀ)⁻¹B) ŷ + Bᵀ(BBᵀ)⁻¹v, with v = Bŷ − c(x, ŷ)
This is the solution to the locally linearized projection problem and corresponds to a Gauss-Newton SQP step (without Hessian of constraints). AdaNP stacks NP layers adaptively until ‖c(x, ỹ)‖ < ε or max_it is reached, relinearizing at each iterate. The Jacobian B is computed via automatic differentiation through the constraint function c only (not the backbone), so the per-step cost is O(N_C³).
Scope of the ε-feasibility claim. For constraints affine in y, a single NP step achieves exact feasibility. For nonlinear constraints, convergence is local: it requires the backbone prediction to lie in a neighborhood of the constraint manifold where LICQ holds and the linearization is accurate. If the backbone is far from feasibility or the Jacobian is ill-conditioned, residuals may remain above ε within the depth cap.
Inequality constraints g(x,y) ≤ 0 are reformulated using the Fischer-Burmeister function
φ_FB(λᵢ, −gᵢ) = √(λᵢ² + gᵢ² + ε_FB) − λᵢ + gᵢ = 0
which encodes the KKT complementarity conditions as an equality. AdaNP then operates in the extended space [y, λ] without any modification to the core algorithm.
Training. ENFORCE is trained with standard Adam on a loss ℓ = ℓ_task + λ_D ‖ŷ − ỹ‖² + λ_C ‖c(x,ỹ)‖, where the displacement penalty λ_D ‖ŷ − ỹ‖² encourages the backbone to produce predictions already close to the constraints manifold, reducing the depth needed at inference. An adaptive activation heuristic (inspired by trust-region methods) enables AdaNP only when the projection improves a task-specific loss measure, providing an automatic warm-up phase before constrained learning begins.
Reproducing paper results
The original benchmark datasets can be downloaded from here and placed in data/raw. The original benchmark training results can be downloaded from here (7.6 GB).
All benchmarks are run through scripts/run_benchmark.py. Select the problem by setting PROBLEM in src/benchmark_problems/config_benchmarking.py, then run from the repo root:
python scripts/run_benchmark.py
Function fitting (equality constraint)
# src/benchmark_problems/config_benchmarking.py
PROBLEM = "function_fitting"
MODEL = "BOTH" # trains ENFORCE and MLP baseline
To reproduce the hyperparameter study (sweep over λ_D and ε_T):
bash scripts/run_hyperparameter_study.sh
Function fitting with inequality constraints
PROBLEM = "sin_ineq"
MODEL = "BOTH"
Engineering case studies
PROBLEM = "extraction_column" # extractive distillation surrogate
# or
PROBLEM = "pooling" # pooling problem (equality + inequality)
MODEL = "BOTH"
Both require the datasets from Iftakher et al.. Download it from here. Place the CSV files under data/raw/<problem>/ as expected by the data paths in config_benchmarking.py.
Parametric optimization benchmarks
PROBLEM = "nonconvex_linear" # nonconvex objective, linear equality constraints
# or
PROBLEM = "nonconvex_nonlinear" # nonconvex objective, nonlinear equality constraints
MODEL = "ENFORCE"
These problems require pre-generated data files. Download them and place them under data/raw/<problem>/ following the filenames in config_benchmarking.py. Data can be generated from the DC3 repository.
General settings
Key flags in src/benchmark_problems/config_benchmarking.py:
| Flag | Default | Effect |
|---|---|---|
MODEL |
"BOTH" |
"ENFORCE", "MLP", or "BOTH" |
N |
5 |
number of independent runs |
PLOT |
True |
save result figures |
SAVE |
True |
save model weights and metrics |
FIX_SEED |
False |
fix random seed across runs |
Contributors
 |
Giacomo Lastrucci |  |
 |
Artur M. Schweidtmann | |
Acknowledgements
This research is supported by Shell Global Solutions International B.V., for which we express sincere gratitude.
License
MIT - see LICENSE.
Copyright (C) 2025 Artur Schweidtmann, TU Delft
👨💼 Contact & Support
Dr. Artur Schweidtmann
Process Intelligence Research
TU Delft
Connect with us:


Built with ❤️ by the Process Intelligence Research team at TU Delft


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file enforce_nn-1.0.2.tar.gz.
File metadata
- Download URL: enforce_nn-1.0.2.tar.gz
- Upload date:
- Size: 10.2 MB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.11.13
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
997fc987cedc68137f704583e00ecf29768a27f60a18006efdcf32e776496bda
|
|
| MD5 |
3f870cca1b3968cec74c862b2a8febe8
|
|
| BLAKE2b-256 |
183dbb86995f36585d12c87eaba8da04b4a472677a39a16f14e70a585db54ac3
|
File details
Details for the file enforce_nn-1.0.2-py3-none-any.whl.
File metadata
- Download URL: enforce_nn-1.0.2-py3-none-any.whl
- Upload date:
- Size: 20.6 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.11.13
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
13e2a923d3b4e277b25284395ef8ce6ca3c31c08ce7c2e9ecfd10c05d4adad31
|
|
| MD5 |
abfbfbb1e2ce16587556bf5b1ace3ef8
|
|
| BLAKE2b-256 |
40ed5dd9d0519910e5032260d5f89fb5f74e1650e1f93ef6fd01d4a0ed964db8
|







