Module to access the HCSR04 sensor on a Raspberry Pi

Project description
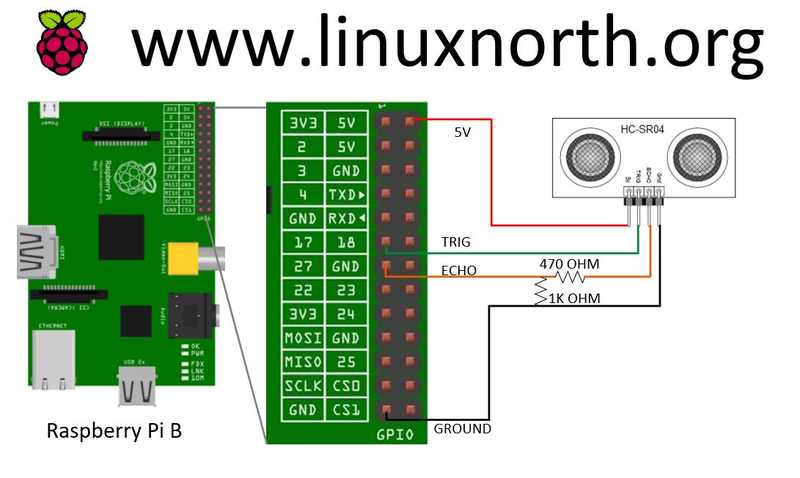
HC-SR04 Ultrasonic Sensor on Raspberry Pi
Calculate distance and depth measurements with an HCSR04 Ultrasonic Sound Sensor and a Raspberry Pi. Instructions assume that you are using Raspbian Linux.
This module also works with the JSN-SR04T waterproof sound sensor.
Python3 Install
Install dependencies;
sudo apt install python3-pip python3-rpi.gpio
The above installs RPi.GPIO 0.7.0. If using Raspberry Pi OS (Bullseye) you may prefer to install RPi.GPIO 0.7.1 with Pip. Either one should work.
To get the latest install it with Pip as follows;
sudo apt remove python3-rpi.gpio <--0.7.0
sudo pip3 install RPi.GPIO <--0.7.1
Install the hcsr04sensor module
sudo pip3 install hcsr04sensor
Description
The module does the following;
-
Returns an error corrected distance by using the median reading of a sorted sample. NOTE - The default sample size is 11 readings.
You can specify a different sample size by passing sample_size=x to raw_distance (where x is your desired number of readings). This is useful if you need to lower the sample size to take quicker readings. Beware that the probability of getting erroneous readings increases as sample size is reduced. For my purposes a sample of 11 readings gives a consistent value that I can trust and takes approximately 3 seconds to run with a 0.1 second wait time between individual samples.
It is also possible to speed up the readings by passing a lower value to sample_wait in raw_distance.
The lower the value the quicker the invidual samples will be taken. A default of 0.1 is a safe wait time but this can be reduced further. CPU usage increases as faster readings are taken as well as the chance for errors.
This module uses BCM pin values. See the Raspberry Pi pin layout documentation for your model.
-
Uses BCM pin values by default. BOARD pin values are supported.
-
Adjusts the reading based on temperature by adjusting the speed of sound.
-
Allows measuring distance and depth in metric and imperial units. See;
pydoc hcsr04sensor.sensor
-
Raises an exception if a faulty cable or sensor prevents an echo pulse from being received.
-
Calculate the volume of different types of containers. See recipes for examples.
Accuracy of Readings
If you need highly accurate readings then this module would not be suitable for your project. In that case you should probably use an Arduino instead of a Raspberry Pi.
Linux is not a Real Time OS so you can expect to get a small variance on each reading, usually within a half cm of the actual value. I say "usually" because every once in a while you can get a reading that is way out of range. This is due to the OS executing other tasks before getting your distance reading. It is why I use a sample of readings. I can always trust that the median of my sample of 11 readings is good.
Highly accurate readings are not required for some applications. For example I use this module in an application I wrote for a sump pump monitor. I am not worried about millimeter accuracy for that application. 1 cm variance on a meter deep pit is close enough to alert me to problems.
Another example would be to calculate the water volume of a drinking water well (standing cylinder shape). It would not matter if you are a gallon off on a 1000 gallon reading.
Distance Limitations
The HCSR04 sensor is suited for short distance readings. The specification manual says it is suitable up to 13 feet. I have tested it to go further than that, but anything over 12 feet starts having periodic strange readings. This module is not suitable for long distances.
Usage
See example scripts in https://github.com/alaudet/hcsr04sensor/tree/master/recipes
Access to Raspberry Pi GPIO pins requires the user account to be in the Linux gpio group.
To add your user account name to the gpio group;
sudo usermod -aG gpio username
Testing the Module
Added a script that is installed to /usr/local/bin called hcsr04.py. This utility does not presently support BOARD pin values. Use BCM pin values.
usage: hcsr04.py [-h] -t TRIG -e ECHO [-sp SPEED] [-ss SAMPLES]
Take a Basic Reading
If you don't want to use a sample of readings for error handling, warnings or pin cleanups I have included a static method in the Measurement class that will return a basic metric reading. It returns the exact one-time reading that is provided by the sensor and RPi.GPIO. This allows you to handle all of these things to your own preference in your code.
See the example basic_reading.py script in https://github.com/alaudet/hcsr04sensor/tree/master/recipes
Contributing
Read the contributing guidelines if you are interested in collaborating on this project.
Donate
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file hcsr04sensor-1.7.tar.gz.
File metadata
- Download URL: hcsr04sensor-1.7.tar.gz
- Upload date:
- Size: 10.6 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.2 CPython/3.11.3
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
40bea4112d141ee92f83cfcf7cb31e53d9e288599462cb88d5461e594445b87e
|
|
| MD5 |
cdfe6b4e146b6ac0106871b50f407309
|
|
| BLAKE2b-256 |
4b56ac541a5b28c35b227b8ad143f610fbf32b5db5dd20785ccf10f545cff1bb
|
File details
Details for the file hcsr04sensor-1.7-py3-none-any.whl.
File metadata
- Download URL: hcsr04sensor-1.7-py3-none-any.whl
- Upload date:
- Size: 7.8 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.2 CPython/3.11.3
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
318392d7c7431d29e8995ac71ddfd9970f57fbb0c52d03a74f332c87f145c844
|
|
| MD5 |
754e8fdb8094602653a9de24f90d5ceb
|
|
| BLAKE2b-256 |
7d4a70ad3d0027ff611a040fb466407d07de5a32c8e24a34f0748e377aab068d
|







