**JaxADi** is a powerful Python library designed to bridge the gap between `casadi.Function` and JAX-compatible functions.
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers

Project description




JaxADi is a Python library designed to bridge the gap between casadi.Function and JAX-compatible functions. By leveraging the strengths of both CasADi and JAX, JAXADI opens up exciting opportunities for building highly efficient, batchable code that can be executed seamlessly across CPUs, GPUs, and TPUs.
JAXADI can be particularly useful in scenarios involving:
- Robotics simulations
- Optimal control problems
- Machine learning models with complex dynamics
Please dive into quick tutorial to get you up to speed in no time

Installation
You can install JAXADI using pip:
pip install jaxadi
For a complete environment setup for examples, we recommend using Conda/Mamba:
mamba env create -f environment.yml
Usage
JAXADI provides a simple and intuitive API:
import casadi as cs
import numpy as np
from jaxadi import translate, convert
from jax import numpy as jnp
x = cs.SX.sym("x", 2, 2)
y = cs.SX.sym("y", 2, 2)
# Define a complex nonlinear function
z = x @ y # Matrix multiplication
z_squared = z * z # Element-wise squaring
z_sin = cs.sin(z) # Element-wise sine
result = z_squared + z_sin # Element-wise addition
# Create the CasADi function
casadi_fn = cs.Function("complex_nonlinear_func", [x, y], [result])
# Get JAX-compatible function string representation
jax_fn_string = translate(casadi_fn)
print(jax_fn_string)
# Define JAX function from CasADi one
jax_fn = convert(casadi_fn, compile=True)
# Run compiled function
input_x = jnp.array(np.random.rand(2, 2))
input_y = jnp.array(np.random.rand(2, 2))
output = jax_fn(input_x, input_y)
Note: For now translation does not support functions with very large number of operations, due to the translation implementation. Secret component of translation is work-tree expansion, which might lead to large overhead in number of symbols. We are working on finding the compromise in both speed and extensive functions support.
Examples
JAXADI comes with several examples to help you get started:
-
Basic Translation: Learn how to translate CasADi functions to JAX.
-
Lowering Operations: Understand the lowering process in JaxADi.
-
Function Conversion: See how to fully convert CasADi functions to JAX.
-
Pendulum Rollout: Batched rollout of the nonlinear passive nonlinear pendulum
-
Pinocchio Integration: Explore how to convert Pinocchio-based CasADi functions to JAX.
-
MJX Comparison: Compare the transformed Pinnocchio forward kinematics with one provided by Mujoco MJX
Note: To run the Pinocchio and MJX examples, ensure you have them properly installed in your environment.
Performance Benchmarks
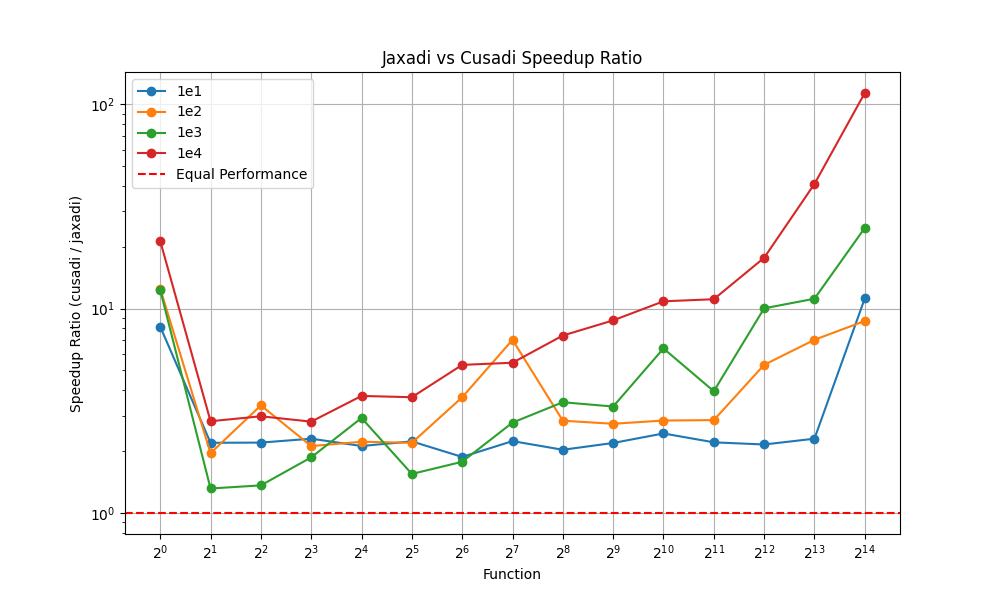
The process of benchmarking and evaluating the performance of Jaxadi is described in the benchmarks directory.
Contributing
We welcome contributions! Please see our Contributing Guide for more details.
Citation
If you use JaxADi in your research, please cite it as follows:
@misc{jaxadi2024,
title = {JaxADi: Bridging CasADi and JAX for Efficient Numerical Computing},
author = {Alentev, Igor and Kozlov, Lev and Nedelchev, Simeon},
year = {2024},
url = {https://github.com/based-robotics/jaxadi},
note = {Accessed: [Insert Access Date]}
}
Acknowledgements
This project draws inspiration from cusadi, with a focus on simplicity and JAX integration.
Contact
For questions, issues, or suggestions, please open an issue on our GitHub repository.
We hope JAXADI empowers your numerical computing and optimization tasks! Happy coding!
Project details
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distributions
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file jaxadi-0.4.0-py3-none-any.whl.
File metadata
- Download URL: jaxadi-0.4.0-py3-none-any.whl
- Upload date:
- Size: 12.4 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
1ca756d67f1b6bbe8e255eca87817d2cde67eaef6d59a132db637ff81bf0dd8a
|
|
| MD5 |
9d6c4d9d73bff4d0968ee1be70d2107f
|
|
| BLAKE2b-256 |
5d072fd9e0c3856f6d6cbe96ac4ad850bda94ba0bd68c0aa4eb8b40f15b03fc7
|
Provenance
The following attestation bundles were made for jaxadi-0.4.0-py3-none-any.whl:
Publisher:
build.yaml on based-robotics/jaxadi
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
jaxadi-0.4.0-py3-none-any.whl -
Subject digest:
1ca756d67f1b6bbe8e255eca87817d2cde67eaef6d59a132db637ff81bf0dd8a - Sigstore transparency entry: 169743349
- Sigstore integration time:
-
Permalink:
based-robotics/jaxadi@39c4325361aa1169d94d5969223b02ab7cd6c9c4 -
Branch / Tag:
refs/tags/v0.4.0 - Owner: https://github.com/based-robotics
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
build.yaml@39c4325361aa1169d94d5969223b02ab7cd6c9c4 -
Trigger Event:
push
-
Statement type:







