Larp (/lärp/): Last-Mile Restrictive Planning


Project description
Larp: Last-Mile Restrictive Planning
A fast, flexible Python toolkit for path planning using artificial potential fields and multi-scale cell decomposition—optimized for dynamic environments and complex spatial constraints.
🔍 Overview
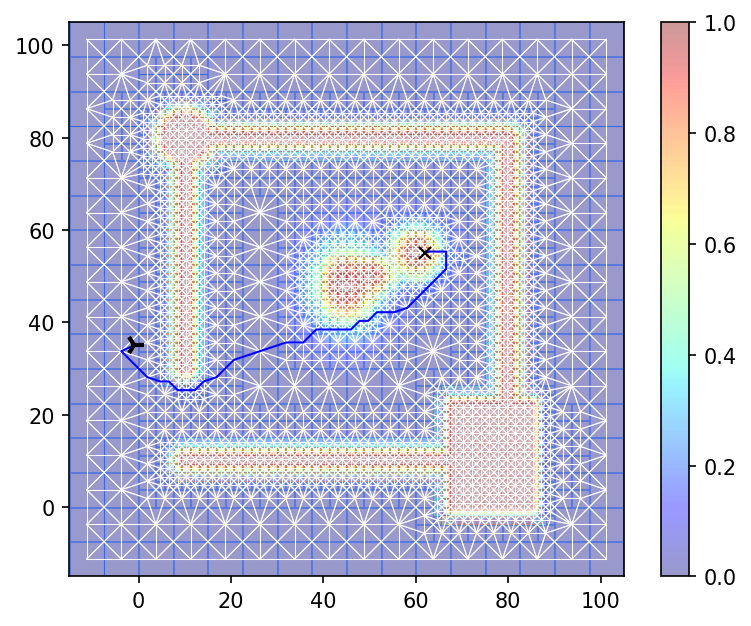
Larp (/lärp/) introduces a novel approach to path planning by leveraging restrictive potential fields as continuous cost maps and decomposing them into a hierarchy of cells. Each cell is assigned a restriction zone based on proximity to obstacles. Larp supports multi-resolution navigation, hot reloading of obstacles, custom path planning policies, and advanced routing optimization.
Originally developed for Unmanned Aerial Vehicles (UAVs) in urban air mobility scenarios, Larp's versatile architecture makes it applicable to a broad range of safe and efficient navigation problems.
🚀 Key Features
- Restrictive Potential Fields: Models obstacles and constraints using repulsive potential fields.
- Multi-Scale Cell Decomposition: Enables efficient navigation and spatial querying via hierarchical cell partitioning.
- Multi-Faceted Path Planning: Combines artificial potential fields with cell-based decomposition for route generation.
- Customizable Trajectory Planning: Custom.
- Flexible Application Domains: Applicable to UAVs, autonomous vehicles, mobile robotics, and more.
📦 Installation
Install Larp from PyPI:
pip install larp
📋 Requirements
- Python 3.8+
numpy>=2.0.0pyprojmatplotlib(optional, for visualization)
🧪 Demos
Explore Larp’s capabilities through interactive Jupyter Notebook demos:
- 📌 General Demo — Introduction to core functionality
- 🔁 Hot Reloading in Room — Dynamic updates of obstacles
- 🏛️ City Center in Lafayette, IN — Path planning around building
- 🏫 Aerial Cargo Delivery — Low-altitude aerial cargo delivery planning on university campus
- 🛫 Urban Air Mobility of EVTOL — Urban air mobility of EVTOL aircraft in Singapore
📚 Citation
If you use Larp in your research or projects, please cite:
@article{rivera2024multi,
title={Multi-Scale Cell Decomposition for Path Planning using Restrictive Routing Potential Fields},
author={Rivera, Josue N and Sun, Dengfeng},
journal={arXiv preprint arXiv:2408.02786},
year={2024}
}
@inproceedings{rivera2024air,
title={Air Traffic Management for Collaborative Routing of Unmanned Aerial Vehicles via Potential Fields},
author={Rivera, Josue N and Sun, Dengfeng},
booktitle={International Conference for Research in Air Transportation},
year={2024},
publisher={ICRAT}
}
🪪 License
Larp is released under the GNU General Public License v3.0.
🔗 Project Links
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file larp-0.3.0.tar.gz.
File metadata
- Download URL: larp-0.3.0.tar.gz
- Upload date:
- Size: 44.0 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.1.0 CPython/3.13.3
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
2f557d1624a4694c0c4b7f23ca8d67867ceee716f8fa97de5300313981a80ec5
|
|
| MD5 |
26307ba73b10ee0a37af52fdcbb01dc1
|
|
| BLAKE2b-256 |
8818ccb0681c1b4c53cf74e5b0ca794445b31aa42b5f65b5f44f1890c06804fb
|
File details
Details for the file larp-0.3.0-py3-none-any.whl.
File metadata
- Download URL: larp-0.3.0-py3-none-any.whl
- Upload date:
- Size: 39.5 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.1.0 CPython/3.13.3
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
b2538b4ca59351f2b9f040bca1f018d4be54226d80d7d9dd876f9cdbf2f49485
|
|
| MD5 |
ac7782d2e87a0dad1c075f1bcd88d5d2
|
|
| BLAKE2b-256 |
24b5e1f3834a2b3887296f0551f8bd4fefae8509d3c4167b392d5bb2a8dffe25
|







