Functions for the lie groups SE(2), SO(2), and SO(3), and SE(3).

Project description
LieGroupsPy
Functions for the Lie Algebra group SE(2) and SE(3)
$$ SE(2) = \begin{bmatrix} R_{11} & R_{12} & t_1 \ R_{21} & R_{22} & t_2 \ 0 & 0 & 1 \end{bmatrix} $$
where:
- ( $\mathbf{R} \in SO(2) $) is the rotation matrix.
- ( $\mathbf{t} \in \mathbb{R}^2 $) is the translation vector.
$$ SE(3) = \begin{bmatrix} R_{11} & R_{12} & R_{13} & t_1 \ R_{21} & R_{22} & R_{23} & t_2 \ R_{31} & R_{32} & R_{33} & t_3 \ 0 & 0 & 0 & 1 \end{bmatrix} $$
where:
- ( $\mathbf{R} \in SO(3) $) is the rotation matrix.
- ( $\mathbf{t} \in \mathbb{R}^3 $) is the translation vector.
This representation is commonly used in robotics and computer vision for rigid body transformations.
Install
To install the library run: pip install lie_groups_py
Development
- Install Poetry
make initto create the virtual environment and install dependenciesmake formatto format the code and check for errorsmake testto run the test suitemake cleanto delete the temporary files and directoriespoetry publish --buildto build and publish to https://pypi.org/project/lie_groups_py/
Usage
"""Basic docstring for my module."""
import matplotlib.pyplot as plt
import numpy as np
from loguru import logger
from se3_group import se3
def main() -> None:
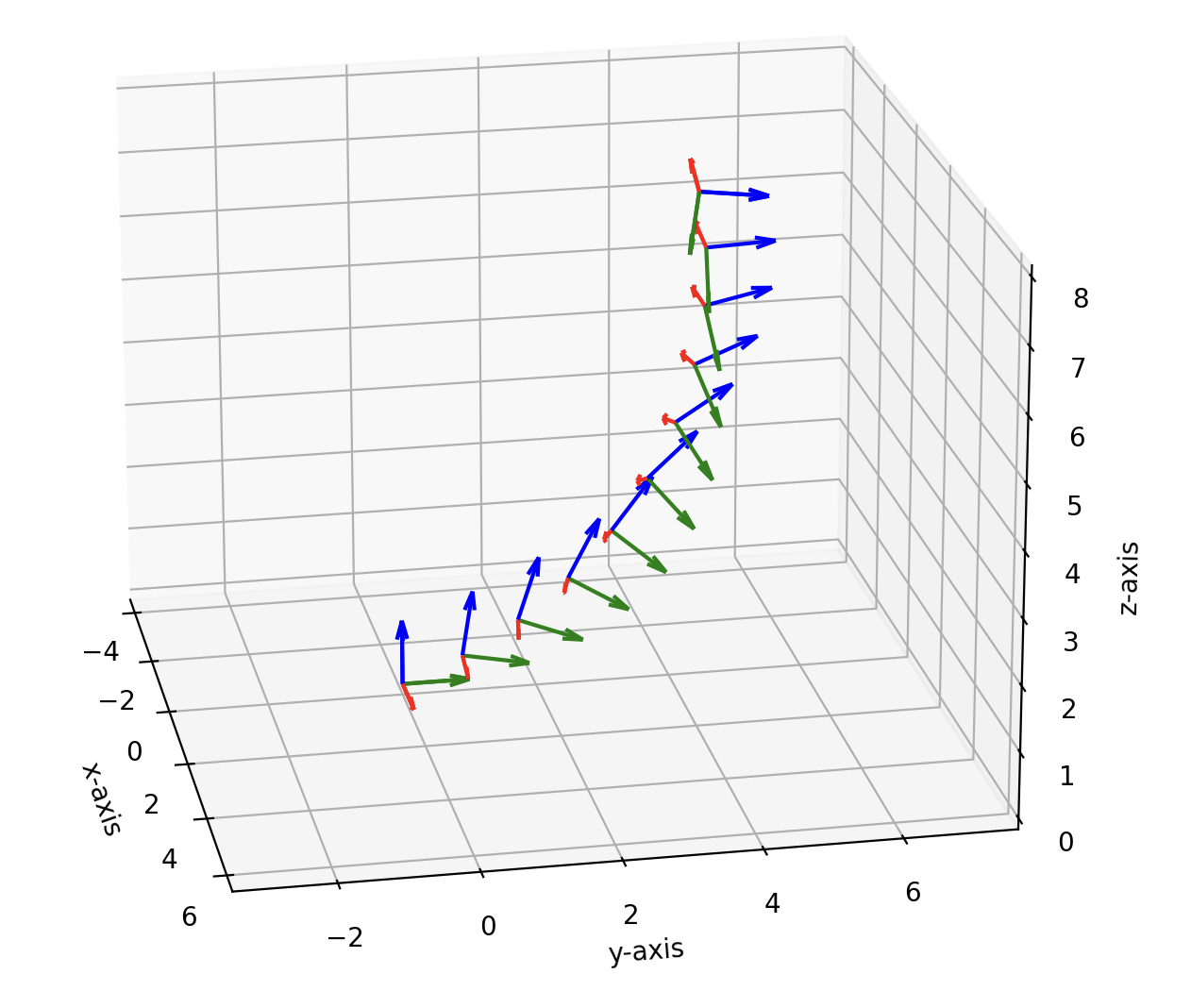
"""Run a simple demonstration."""
pose_0 = se3.SE3(
xyz=np.array([0.0, 0.0, 0.0]),
rot=np.eye(3),
)
pose_1 = se3.SE3(
xyz=np.array([[2.0], [4.0], [8.0]]),
roll_pitch_yaw=np.array([np.pi / 2, np.pi / 4, np.pi / 8]),
)
logger.info(f"Pose 1: {pose_0}")
logger.info(f"Pose 2: {pose_1}")
fig = plt.figure()
ax = fig.add_subplot(111, projection="3d")
pose_0.plot(ax)
pose_1.plot(ax)
for t in np.arange(0.0, 1.01, 0.1):
pose_interp = se3.interpolate(pose_1, pose_0, t=t)
pose_interp.plot(ax)
logger.info(f"Interpolated Pose at t={t:.2f}: {pose_interp}")
plt.axis("equal")
ax.set_xlabel("x-axis")
ax.set_ylabel("y-axis")
ax.set_zlabel("z-axis")
plt.tight_layout()
plt.show()
if __name__ == "__main__":
main()
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file lie_groups_py-0.1.7.tar.gz.
File metadata
- Download URL: lie_groups_py-0.1.7.tar.gz
- Upload date:
- Size: 5.7 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/2.1.1 CPython/3.13.2 Darwin/24.4.0
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
a0776441fd49a34466790ddb6828bc4821f3c480863526e11b4a96c3d4cfc246
|
|
| MD5 |
515c20c2444f1e0f7d54a5109f6e7935
|
|
| BLAKE2b-256 |
e89ce0defe9ac6039009ca47f9d4f211271122d9e34d7e1965be13247b653633
|
File details
Details for the file lie_groups_py-0.1.7-py3-none-any.whl.
File metadata
- Download URL: lie_groups_py-0.1.7-py3-none-any.whl
- Upload date:
- Size: 6.6 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/2.1.1 CPython/3.13.2 Darwin/24.4.0
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
2f52a3ee6e833bbb4fa1859617dcaacc24873baea3f1000568102262bf7a0908
|
|
| MD5 |
2a8fddde902923acd0f6b79aa7d1fd0f
|
|
| BLAKE2b-256 |
e1dbb75771c01565e8d42600b0b673d9d740fba38f435ca9899ac582878c7a0f
|







