Simple minimum-snap trajectory generator

Project description
Minsnap Trajectories
Simple Python/Numpy implementation of the Minimum Snap Trajectory Generation algorithm.
This package addresses the shortage of turnkey minsnap trajectory generator implementations on PyPI. It implements two of the most time-tested algorithms in this area:
-
Mellinger and Kumar's original Minimum Snap Trajectory Generator [1]
-
Roy and Bry's numerically stable, unconstrained quadratic program [2]
and an important utility in generating quadrotor trajectories:
- Aerodynamic-effects-aware flatness map from flat outputs to quadrotor state and inputs
[1]: D. Mellinger and V. Kumar. Minimum snap trajectory generation and control for quadrotors. In Proc. Int. Conf. on Robotics and Automation, 2011
[2]: C. Richter, A. Bry, and N. Roy. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments. In Int. Symposium on Robotics Research, 2013
Get Started
Preliminaries
Use the following convention to import this package
import minsnap_trajectories as ms
Derivatives on position are numbered from 0, as shown below
| Orders (# of derivatives) | 0 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|
| Quantity | Position | Velocity | Acceleration | Jerk | Snap |
TLDR
Four key names
ms.Waypoint: Time, position, velocity, etc. waypoint. A sequence of this defines the trajectoryms.generate_trajectory: Generates the piecewise-polynomial trajectoryms.compute_trajectory_derivatives: Samples the polynomial for position/velocity/acceleration, etc.ms.compute_quadrotor_trajectory: Directly compute quadrotor state/inputs along the trajectory
Full usage example
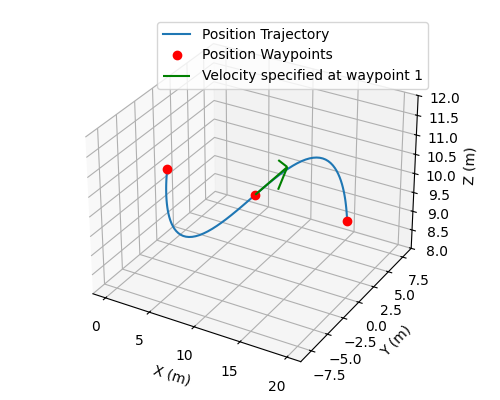
Define a sequence of position (and optionally velocity, acceleration, higher-order) references
refs = [
ms.Waypoint(
time=0.0,
position=np.array([0.0, 0.0, 10.0]),
),
ms.Waypoint( # Any higher-order derivatives
time=8.0,
position=np.array([10.0, 0.0, 10.0]),
velocity=np.array([0.0, 5.0, 0.0]),
acceleration=np.array([0.1, 0.0, 0.0]),
),
ms.Waypoint( # Potentially leave intermediate-order derivatives unspecified
time=16.0,
position=np.array([20.0, 0.0, 10.0]),
jerk=np.array([0.1, 0.0, 0.2]),
),
]
Generate a piecewise polynomial trajectory using Roy and Bry's closed form solution, minimizing jerk (order-3) AND snap (order-4) while constraining position, velocity, etc... up to jerk (orders 0 to 3) to be continuous
polys = ms.generate_trajectory(
refs,
degree=8, # Polynomial degree
idx_minimized_orders=(3, 4),
num_continuous_orders=3,
algorithm="closed-form", # Or "constrained"
)
# Inspect the output
t = polys.time_reference
dt = polys.durations
cfs = polys.coefficients
Sample the polynomial trajectory to get position, velocity, acceleration (or higher-order) trajectories
t = np.linspace(0, 16, 100)
# Sample up to the 3rd order (Jerk) -----v
pva = ms.compute_trajectory_derivatives(polys, t, 3)
position = pva[0, ...]
velocity = pva[1, ...]
Or directly generate a quadrotor UAV trajectory
t = np.linspace(0, 15, 100)
states, inputs = ms.compute_quadrotor_trajectory(
polys,
t,
vehicle_mass=1.0, # Quadrotor weight
yaw="velocity", # Align yaw angle to quadrotor velocity
drag_params=ms.RotorDragParameters(0.1, 0.2, 1.0),
)
Limitations
Tests are not nearly enough!
Existing tests show that this piecewise polynomial planner behaves identically to two of the more approachable MATLAB-based trajectory generator implementations by icsl-Jeon and symao.
-
The polynomial planner is not well-guarded against the case when the polynomial planning problem is overconstrained, i.e.
- The polynomial degree is too low
- Too many orders of derivatives are constrained to be continuous
-
The quadrotor trajectory generator is not extensively tested (the rotor-drag effect compensation function is even more so).
Until more extensive tests are available, use the following parameters in polynomial planning (they are the defaults)
degree: From 5 to 15idx_minimized_orders: 4 (Minimum snap)num_continuous_orders: 3 (Just keep position/velocity/acceleration continuous)


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file minsnap_trajectories-0.1.2.tar.gz.
File metadata
- Download URL: minsnap_trajectories-0.1.2.tar.gz
- Upload date:
- Size: 154.7 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.0.0 CPython/3.12.1
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
7051c9da25e3a98d5b4701610a161a08d13445fb13ba5dc3346d82c455bcf253
|
|
| MD5 |
dd6ec3602d6ec623845f2ca807d2abab
|
|
| BLAKE2b-256 |
c9d73e3b456ce6c53a3ce026d354dc9f640fd25e50fb90a0590fb2f5d5ba226d
|
File details
Details for the file minsnap_trajectories-0.1.2-py3-none-any.whl.
File metadata
- Download URL: minsnap_trajectories-0.1.2-py3-none-any.whl
- Upload date:
- Size: 12.4 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.0.0 CPython/3.12.1
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
0e210f63f14d9c123acda2c20f755fd04fce9ac5f8117ccddc7138c3dfd11739
|
|
| MD5 |
c7b56a46273406e6f17764e031926395
|
|
| BLAKE2b-256 |
58faf5b2d30dc4ac02987c260a42ddd0052e6e5973456fac011d3989a06e6f3e
|







