Perceptual photomosaic generator — Oklab color matching, MKL optimal transport, Hungarian placement, and Oklch tile-pool expansion
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers

Project description
mosaicraft
A Python photomosaic generator built on the Oklab perceptual color space, MKL optimal transport, Laplacian pyramid blending, and Oklch tile-pool expansion.






mosaicraft rebuilds a target image as a grid of smaller tile photographs. Most photomosaic libraries use mean-color matching in RGB or HSV. mosaicraft does something different: every step of the pipeline runs in a perceptual color space, and every cell of the output is a distinct photograph.
What's inside:
- Oklab perceptual color space — Björn Ottosson's 2020 colour space, noticeably more uniform than CIELAB on the saturated colours photomosaics spend most of their compute budget matching, at the same compute cost.
- MKL optimal transport color transfer — matches the full covariance of each tile's color distribution to the target, preserving the shape of the original tile instead of flattening it.
- Hungarian 1:1 placement — globally optimal assignment of tiles to cells via the Jonker–Volgenant algorithm. Falls back to FAISS + Floyd–Steinberg error diffusion when the cost matrix exceeds memory.
- Laplacian pyramid blending — removes grid lines without blurring detail.
- Oklch tile-pool expansion — generates N hue-rotated variants of every tile in the pool, multiplying the effective catalog size by (N+1) with zero extra photographs.
The hero image above is reproducible from this repository. python scripts/download_demo_assets.py fetches ~8 MB of demo assets and CC0 tiles; python scripts/generate_readme_figures.py then writes every image in this README.
Installation
pip install mosaicraft # PyPI
pip install "mosaicraft[faiss]" # with FAISS for huge tile pools
Requires Python 3.9+, NumPy ≥ 1.23, OpenCV ≥ 4.6, SciPy ≥ 1.10, scikit-image ≥ 0.20. No GPU required; FAISS is optional.
Quick start
CLI
# Basic: target image + tile directory.
mosaicraft generate photo.jpg --tiles ./tiles --output mosaic.jpg
# Pick a preset and target cell count.
mosaicraft generate photo.jpg -t ./tiles -o vivid.jpg --preset vivid -n 5000
# Expand a 1,024-tile pool into 5,120 candidates with Oklch hue rotation.
mosaicraft generate photo.jpg -t ./tiles -o big.jpg --color-variants 4
# Pre-build a feature cache so subsequent runs load in under a second.
mosaicraft cache --tiles ./tiles --cache-dir ./cache --sizes 56 88 120
# List all presets.
mosaicraft presets
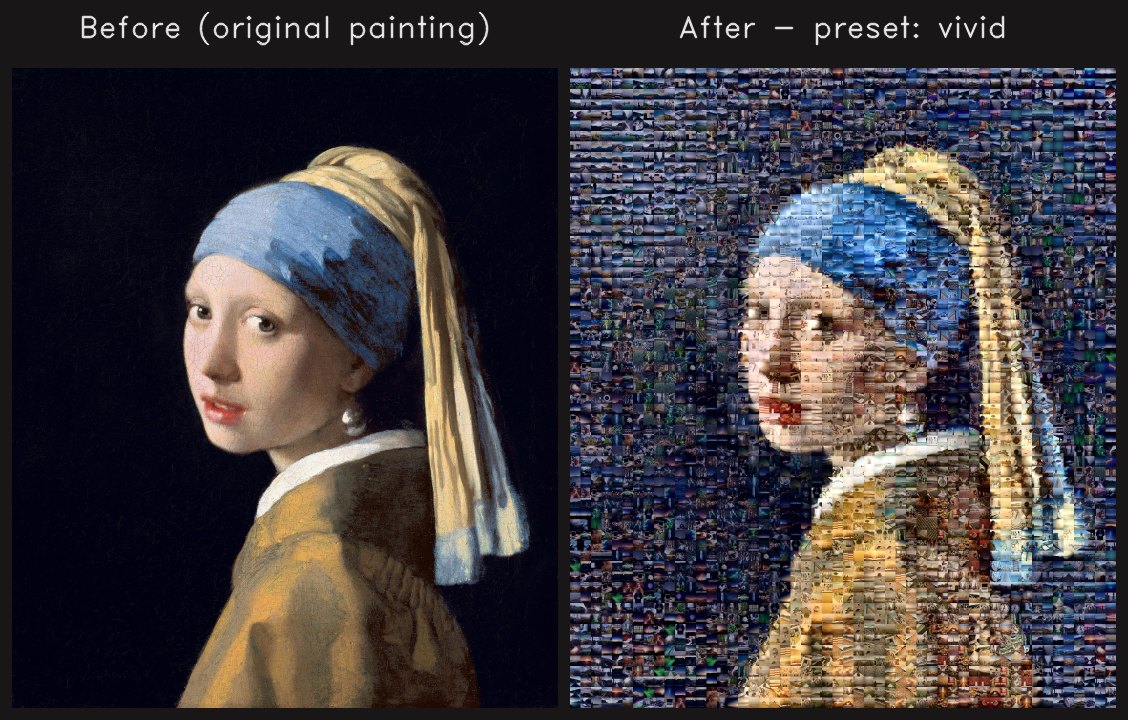
Target: Vermeer, Girl with a Pearl Earring (1,366 × 1,600 px). 1,024-image CC0 tile pool × 4 augmentations = 4,096 candidates. 52 × 61 = 3,172 cells. Preset vivid.
Python API
from mosaicraft import MosaicGenerator
gen = MosaicGenerator(
tile_dir="./tiles",
preset="vivid",
color_variants=4, # 1,024 tiles -> 5,120 candidates
)
result = gen.generate("photo.jpg", "mosaic.jpg", target_tiles=5000)
Pipeline
┌─────────────────────┐
│ Tile collection │
└──────────┬──────────┘
│
┌──────────▼──────────┐ ┌────────────────────┐
│ Feature extraction │───▶│ 4x flip/brightness │
│ (191 dimensions) │ │ + Oklch variants │
└──────────┬──────────┘ └─────────┬──────────┘
│ │
└────────────┬────────────┘
│
┌────────────────────┐ ┌─────────▼───────────┐
│ Target image │──────▶│ Per-cell features │
└────────────────────┘ │ + Oklab means │
└─────────┬───────────┘
│
┌──────────────────▼──────────────────┐
│ Saliency-weighted cost matrix │
│ (191-D L2 + Oklab ΔE) │
└──────────────────┬──────────────────┘
│
┌──────────────────▼──────────────────┐
│ Hungarian 1:1 assignment │
│ (or FAISS + Floyd–Steinberg) │
└──────────────────┬──────────────────┘
│
┌──────────────────▼──────────────────┐
│ Neighbor-swap refinement (2-opt) │
│ then NCC + SSIM rerank │
└──────────────────┬──────────────────┘
│
┌──────────────────▼──────────────────┐
│ Per-tile MKL optimal transport │
│ Laplacian pyramid blend │
│ Oklch vibrance / skin protection │
└──────────────────┬──────────────────┘
▼
output
Why Oklab? CIELAB was calibrated on small colour differences; it underestimates perceptual distance for the large jumps a photomosaic routinely makes. Oklab (Björn Ottosson, 2020) was rebuilt on modern colour-difference data and is noticeably more uniform on the saturated regions a photomosaic spends most of its compute budget matching. Dropping it into the cost function is free and visibly improves matches on saturated photos.
Why MKL optimal transport? Reinhard color transfer matches the first and second moments of the LAB distribution. MKL (Pitié et al., 2007) matches the full covariance, so the shape of the tile's color distribution is preserved as its statistics slide toward the target cell. Details survive; averages don't win.
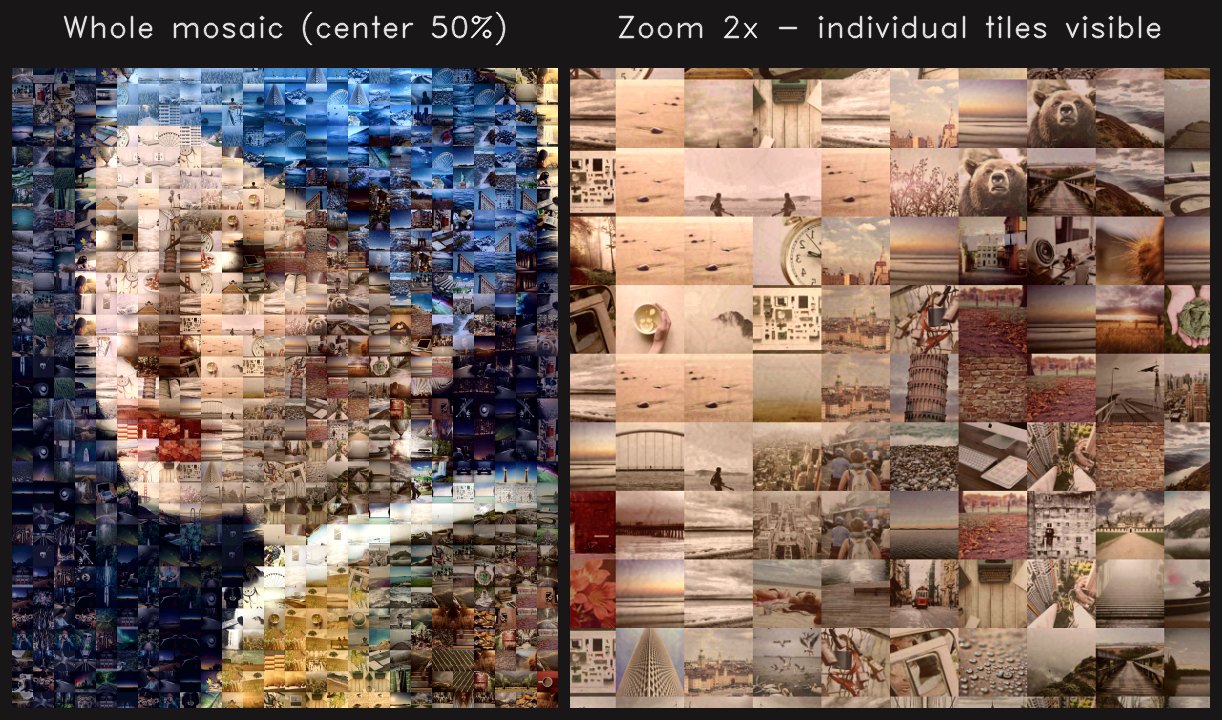
Left: the center of the mosaic — at reading distance, the painting is recognizable. Right: a 2× nearest-neighbor zoom — every cell is a distinct CC0 photograph.
Oklch tile-pool expansion
One of the hardest problems in photomosaic generation is having enough tiles. A 1,000-image pool gives ~1,000 mean colors, so a 5,000-cell mosaic is forced to repeat. color_variants=N rotates every tile through N evenly-spaced hue shifts in Oklch (the default schedule is 72° / 144° / 216° / 288°), reusing the same photograph at four new positions on the a/b plane:
gen = MosaicGenerator(tile_dir="./tiles", preset="vivid", color_variants=4)
Lightness is preserved exactly, so texture and shading are untouched — only hue and chroma move. For a 1,024-tile pool this turns into 5,120 candidates after Oklch expansion (1,024 × 5 = original + 4 hue rotations), or 20,480 once the default flip + brightness augmentation is layered on top. The Hungarian assignment then has an order of magnitude more material to work with.
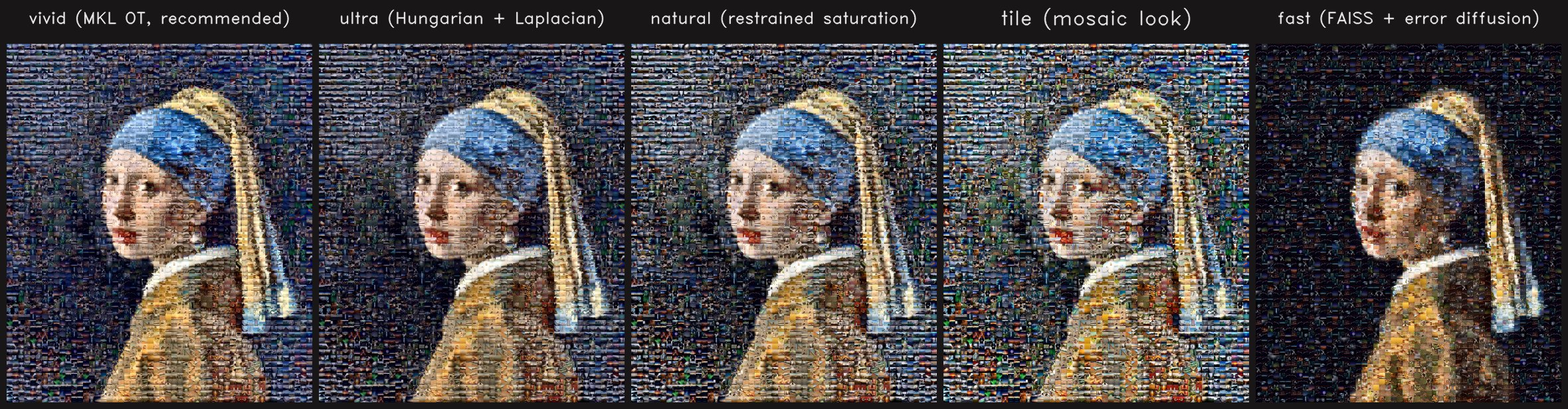
Presets
| Preset | Best for |
|---|---|
vivid |
Recommended. MKL optimal transport with skin protection. |
ultra |
Hungarian + Laplacian blend. Highest pixel fidelity. |
natural |
Photo-realistic look, restrained saturation. |
tile |
Emphasizes individual tiles. Strongest mosaic look. |
fast |
FAISS + error diffusion only. No rerank, no Hungarian. |
Pass a dict to MosaicGenerator(preset={...}) to override individual keys. See src/mosaicraft/presets.py for the full schema.
Benchmarks
Small-pool wall time (256-tile pool, cold start)
Produced by python benchmarks/benchmark_pipeline.py — a single MosaicGenerator pass, tiles loaded from disk every time, no feature cache, no GPU, no FAISS.
| preset | 200 cells | 500 cells | 1,000 cells |
|---|---|---|---|
| fast | 3.00 s | 4.42 s | 6.87 s |
| natural | 2.79 s | 4.38 s | 7.49 s |
| ultra | 2.86 s | 4.64 s | 7.61 s |
| vivid | 2.92 s | 4.69 s | 7.85 s |
AMD Ryzen 7 7735HS, WSL2 / Ubuntu 24.04, Python 3.12, NumPy + OpenCV wheels.
Large-pool regime (1,024-tile pool, up to 30,000 cells)
Run python benchmarks/benchmark_pipeline.py --scale large to reproduce. Every cell is one tile selected from the 1,024 CC0 photograph pool × 4 augmentations (1 horizontal flip + 3 brightness shifts) = 4,096 candidates. Every case is run cold — tiles loaded from disk on every invocation.
| preset | metric | 5,000 cells | 10,000 cells | 20,000 cells | 30,000 cells |
|---|---|---|---|---|---|
| fast | wall time | 28.3 s | 51.1 s | 95.0 s | 190.2 s |
| fast | peak RSS | 4,691 MB | 4,840 MB | 9,373 MB | 7,264 MB |
| ultra | wall time | 73.9 s | 99.8 s | 110.7 s | 181.7 s |
The 30,000-cell output is 8,904 × 10,472 px ≈ 93 megapixels and the finished JPEG is ~47 MB. (ultra runs faster than fast at the 20k / 30k end because the Hungarian assignment saturates before the FAISS + error-diffusion code path stops benefiting from more cells; your mileage will vary with the tile pool / cell size ratio.)
50,000-cell estimate (CPU only, no GPU):
| preset | est. time | est. peak RAM |
|---|---|---|
fast |
~5–7 min | 8–12 GB |
vivid |
~4–6 min | 12–16 GB |
vivid --color-variants 4 |
~10–15 min | 20–25 GB |
Output: ~14,000 × 14,000 px ≈ 200 megapixels. The dominant memory cost is the dense Hungarian cost matrix (n_cells × n_candidates × 8 bytes); fast avoids it via FAISS.
Compared against other photomosaic OSS
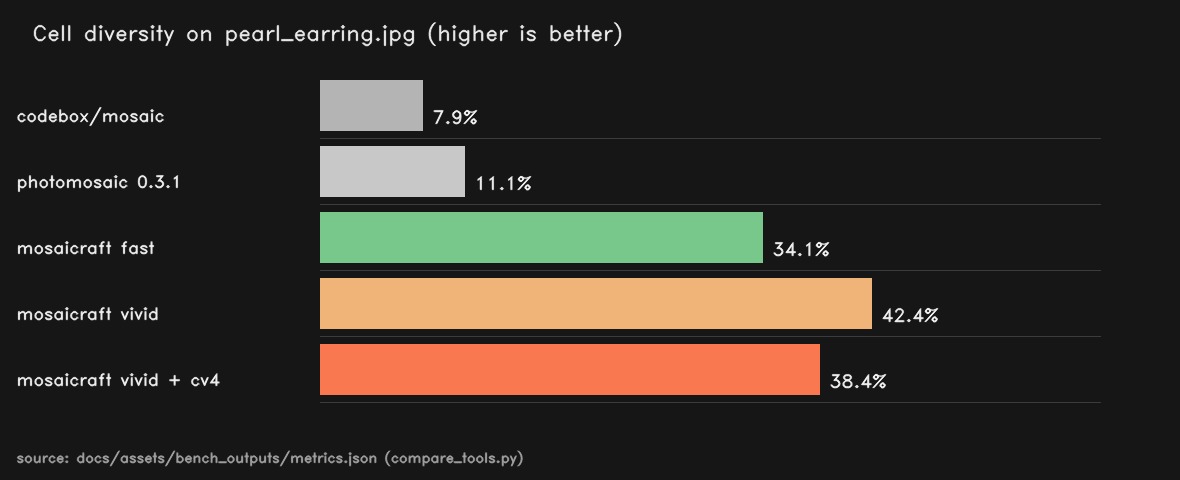
Cell diversity is what separates a photomosaic from a four-colour halftone — at 8% the grid is essentially the same dozen tiles repeated all over, at 40%+ each cell is its own photo. The chart above shows the metric on Vermeer's Girl with a Pearl Earring against a shared 1,024-image CC0 pool, regenerated by benchmarks/compare_tools.py and saved to docs/assets/bench_outputs/metrics.json.
mosaicraft is not the only library that uses linear-sum assignment for tile placement: phomo, phomo-rs, and image-collage-maker all do 1:1 placement too. The combination that makes mosaicraft different is Oklab perceptual colour matching + per-tile MKL optimal-transport colour transfer + Oklch hue-rotation pool expansion in the same pipeline. To my knowledge no other OSS photomosaic library ships all three.
Pixel metrics (click to expand)
Target: Vermeer, Girl with a Pearl Earring. Grid: 40×40 = 1,600 cells. 1,024 CC0 tiles. Numbers below are read directly from docs/assets/bench_outputs/metrics.json; rerun python benchmarks/compare_tools.py --target pearl_earring.jpg --grid 40 to refresh.
| Tool | Wall | SSIM ↑ | LPIPS ↓ | ΔE2000 ↓ | Diversity ↑ |
|---|---|---|---|---|---|
| codebox/mosaic (RGB mean) | 1.3 s | 0.250 | 0.544 | 10.32 | 0.079 |
| photomosaic 0.3.1 (CIELAB) | 2.1 s | 0.065 | 0.776 | 37.18 | 0.111 |
mosaicraft fast |
17.2 s | 0.216 | 0.630 | 10.85 | 0.341 |
mosaicraft vivid |
22.2 s | 0.148 | 0.627 | 15.12 | 0.424 |
mosaicraft vivid --cv 4 |
77.6 s | 0.224 | 0.559 | 11.06 | 0.384 |
SSIM and ΔE2000 reward pixel fidelity, which structurally favours mean-matching tools that reuse the same tiles. LPIPS (Zhang et al., CVPR 2018) correlates better with human judgement. Cell diversity counts the number of visually distinct cells (5-bit-quantised mean colour) — at 0.42 the same Vermeer that looks like a flat halftone in codebox (0.08) is built from ~670 distinct photos out of 1,600 cells.
vivid --cv 4 trades a small amount of bucket diversity (0.424 → 0.384) for an LPIPS gain (0.627 → 0.559) and a ΔE2000 improvement (15.12 → 11.06): the 4× hue-rotated pool gives the cost-matrix more colour matches, so cells get colour-closer tiles instead of more distinct tiles. Pick vivid if cell diversity matters most, vivid --cv 4 if perceptual fidelity does.
python benchmarks/compare_tools.py --target pearl_earring.jpg --grid 40
Python API
from mosaicraft import MosaicGenerator, rotate_hue_oklch
# Generator
gen = MosaicGenerator(
tile_dir="./tiles", # or cache_dir="./cache"
preset="vivid", # preset name or dict
augment=True, # 4x flip + brightness augmentation
color_variants=0, # set to >0 to expand pool via Oklch rotation
)
result = gen.generate("photo.jpg", "mosaic.jpg", target_tiles=2000, tile_size=88)
# Rotate a single tile or patch in Oklch (preserves L exactly)
rotated_bgr = rotate_hue_oklch(tile_bgr, hue_shift_deg=90)
MosaicResult exposes image (numpy BGR), grid_cols, grid_rows, tile_size, output_path, n_tiles.
Helpers:
mosaicraft.list_presets()— mosaic preset names.mosaicraft.build_cache(tile_dir, cache_dir, tile_sizes, thumb_size=120)— precompute features.mosaicraft.calc_grid(target_tiles, aspect_w, aspect_h)— pick a grid for a desired cell count.
Lower-level building blocks live in mosaicraft.color, mosaicraft.features, mosaicraft.placement, mosaicraft.blending, mosaicraft.postprocess, mosaicraft.saliency, mosaicraft.color_augment, mosaicraft.tiles, and mosaicraft.utils.
Reproducible figures
Every image in this README — hero, before/after, preset comparison, zoom detail, tile sample, and comparison table — is produced by two self-contained scripts:
# 1. Bootstrap public-domain demo assets (~8 MB, one time).
python scripts/download_demo_assets.py
python scripts/download_demo_assets.py --verify-only # SHA256 integrity check
# 2. Render figures.
python scripts/generate_readme_figures.py
python scripts/generate_readme_figures.py --quick # faster iteration
# 3. Run the OSS comparison benchmark.
python benchmarks/compare_tools.py --target pearl_earring.jpg --grid 40
SHA256 and license metadata for every bootstrapped file live in docs/assets/MANIFEST.json. Downloaded images (paintings from Wikimedia, tiles from picsum) are not committed; only the manifest ships with the repository.
Testing
pip install -e ".[dev]"
pytest # unit + pipeline + CLI tests
ruff check src tests # lint
bandit -r src -ll # security scan
Contributing
Bug reports, feature requests, and pull requests are welcome. See CONTRIBUTING.md for the development workflow. Security issues: see SECURITY.md.
License and image credits
Apache License 2.0 for human use. See LICENSE.
AI/ML training opt-out: this repository is opted out of AI/ML training, fine-tuning, and embedding generation — see ai.txt. Training use requires separately negotiated written permission.
Image credits:
- Target painting — Johannes Vermeer, Girl with a Pearl Earring (c. 1665), public domain, via Wikimedia Commons.
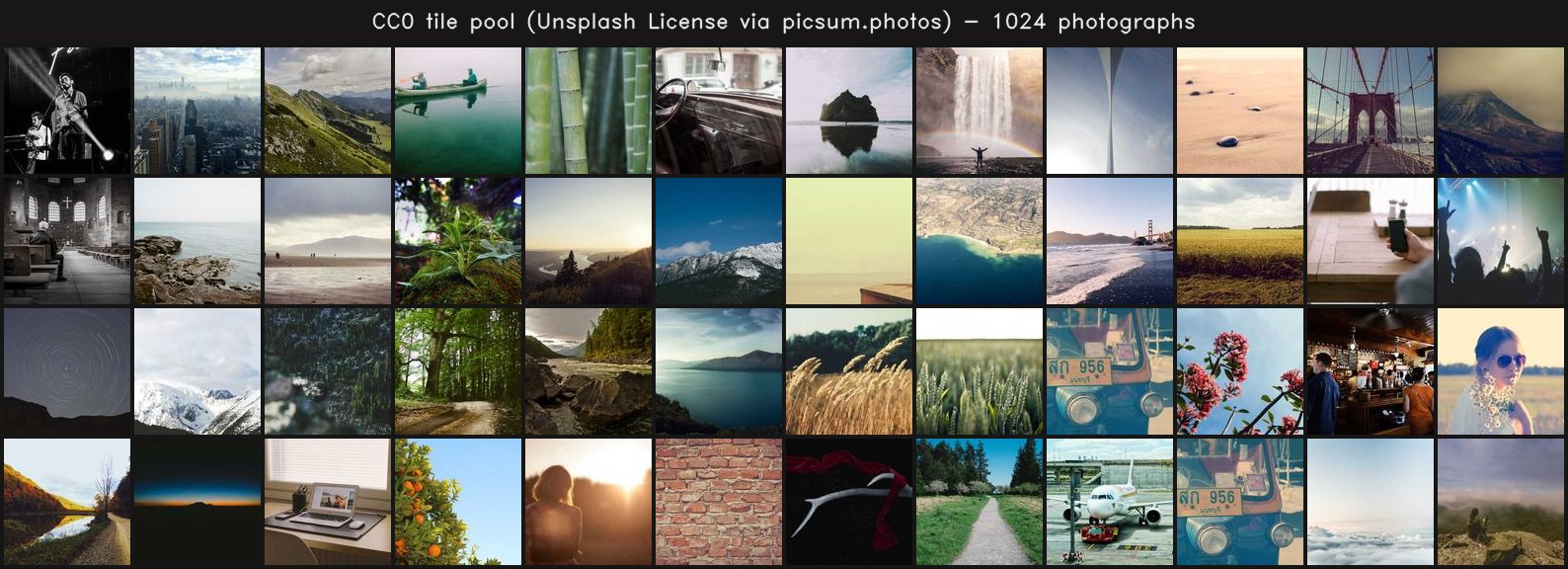
- Tile pool — 1,024 photographs from picsum.photos (Unsplash-sourced, Unsplash License — effectively CC0).
References
mosaicraft stands on the following classic and modern work:
- Björn Ottosson, A perceptual color space for image processing (2020, blog). Oklab.
- Pitié, F. et al., The linear Monge-Kantorovitch linear colour mapping for example-based colour transfer (IET-CVMP 2007). MKL.
- Reinhard, E. et al., Color transfer between images (IEEE CGA 2001).
- Zhang, R. et al., The Unreasonable Effectiveness of Deep Features as a Perceptual Metric (CVPR 2018). LPIPS.
- Wang, Z. et al., Image quality assessment: from error visibility to structural similarity (IEEE TIP 2004). SSIM.
- Tesfaldet, M. et al., Convolutional Photomosaic Generation via Multi-Scale Perceptual Losses (ECCVW 2018). Multi-scale perceptual loss for photomosaic quality assessment.
- Burt, P. & Adelson, E., A multiresolution spline with application to image mosaics (ACM ToG 1983). Laplacian pyramid blending.
- Kuhn, H. W., The Hungarian method for the assignment problem (Naval Research Logistics 1955).
Project details
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file mosaicraft-0.4.0.tar.gz.
File metadata
- Download URL: mosaicraft-0.4.0.tar.gz
- Upload date:
- Size: 61.1 kB
- Tags: Source
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
805adeb9188fb23c0997dbd8379cbc3321a30d172d109f9d68ada9bf778be1cf
|
|
| MD5 |
78c69c4b573acfbef9abddb461baf178
|
|
| BLAKE2b-256 |
07b4a232967107dfab61aecc35449c3954e70689637c5bbb34103f99e513e689
|
Provenance
The following attestation bundles were made for mosaicraft-0.4.0.tar.gz:
Publisher:
release.yml on hinanohart/mosaicraft
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
mosaicraft-0.4.0.tar.gz -
Subject digest:
805adeb9188fb23c0997dbd8379cbc3321a30d172d109f9d68ada9bf778be1cf - Sigstore transparency entry: 1486856294
- Sigstore integration time:
-
Permalink:
hinanohart/mosaicraft@21becfb7c0bbd44e600d87182dd088b40c91ccf0 -
Branch / Tag:
refs/tags/v0.4.0 - Owner: https://github.com/hinanohart
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
release.yml@21becfb7c0bbd44e600d87182dd088b40c91ccf0 -
Trigger Event:
push
-
Statement type:
File details
Details for the file mosaicraft-0.4.0-py3-none-any.whl.
File metadata
- Download URL: mosaicraft-0.4.0-py3-none-any.whl
- Upload date:
- Size: 48.9 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
bb7d198c477bac66ad9068ec8eb441c4ad9f4335f09907e39e6846ec451a894c
|
|
| MD5 |
35e87efdb9fcb10a931f5e28331edf7c
|
|
| BLAKE2b-256 |
3263786c6c2e07d9e9d6d9dc227973d1361bbc90b5ee302e66b67d2cd8c889dd
|
Provenance
The following attestation bundles were made for mosaicraft-0.4.0-py3-none-any.whl:
Publisher:
release.yml on hinanohart/mosaicraft
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
mosaicraft-0.4.0-py3-none-any.whl -
Subject digest:
bb7d198c477bac66ad9068ec8eb441c4ad9f4335f09907e39e6846ec451a894c - Sigstore transparency entry: 1486856323
- Sigstore integration time:
-
Permalink:
hinanohart/mosaicraft@21becfb7c0bbd44e600d87182dd088b40c91ccf0 -
Branch / Tag:
refs/tags/v0.4.0 - Owner: https://github.com/hinanohart
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
release.yml@21becfb7c0bbd44e600d87182dd088b40c91ccf0 -
Trigger Event:
push
-
Statement type:







