MuscleMimic Models
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers


Project description
MuscleMimic Models





Oneline install:
pip install musclemimic-models
Musclemimic_models is part of the MuscleMimic research project, in which we created physiologically realistic, muscle-driven musculoskeletal models built on top of MyoSuite. This repository is designed to provide users with two musculoskeletal models: BimanualMuscle and MyoFullBody, that could be used together or independently from the Musclemimic pipeline.
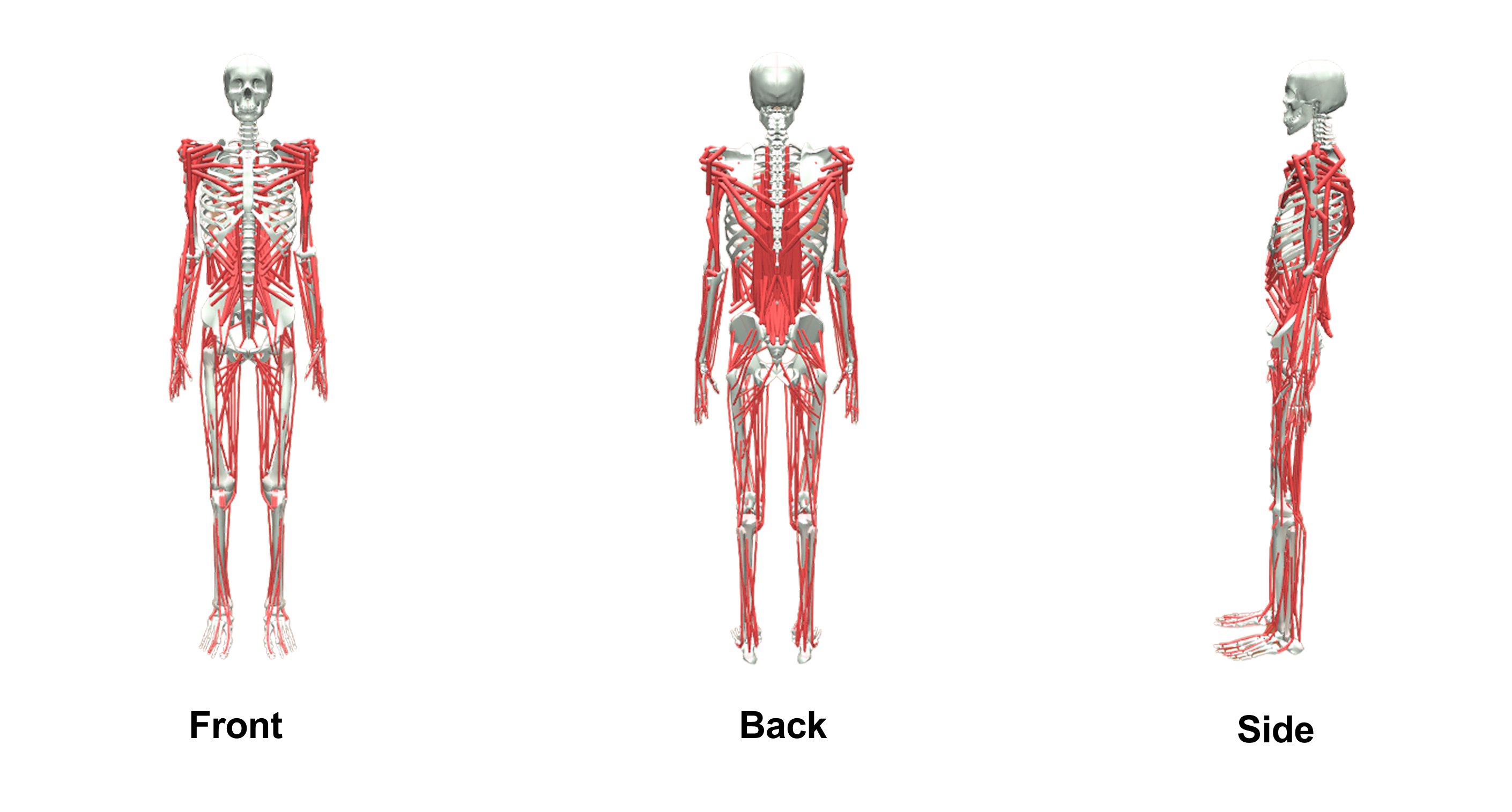
MyoFullBody enables realistic full-body motion control with pure muscle actuation. Below are example fullbody motions demonstrating the model's capabilities, all policies were trained with MuscleMimic.
| Backwards Walking | Walking Running |
| Walking Turning | Dancing |
MyoFullbody also allows accurate kinematics when trained with MuscleMimic on AMASS data
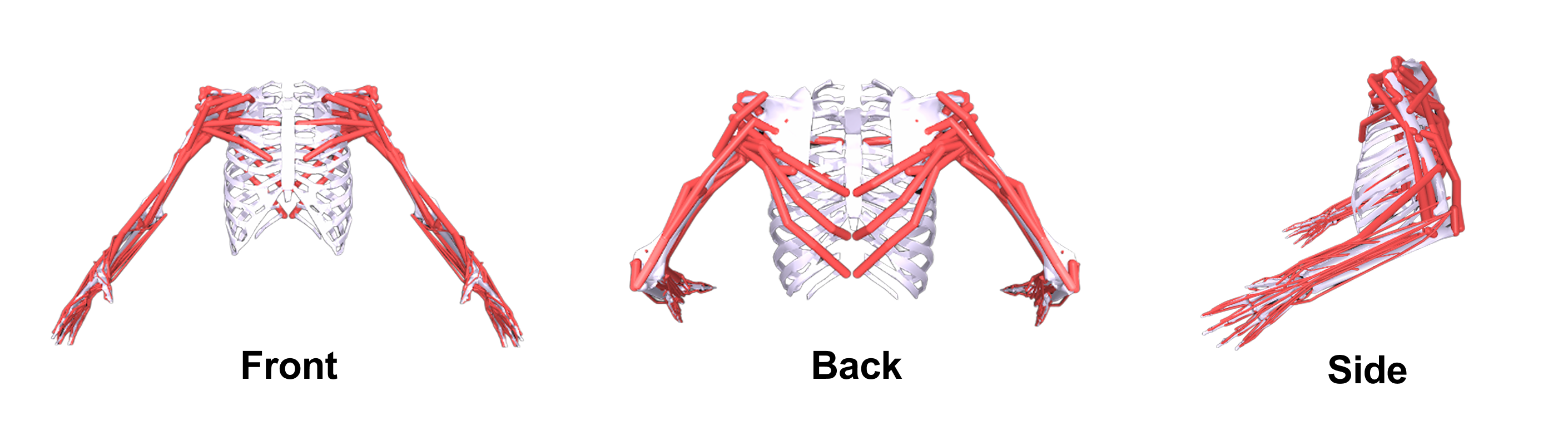
BimanualMuscle focuses on upper-limb musculoskeletal control, enabling faster training convergence while preserving full finger articulation capabilities. (The videos shown below were recorded with finger actuation disabled)
| Lifting Box | Waving |
| Drinking Water | Jumpingjack |
Musculoskeletal Models
Both musculoskeletal models are built on MyoSuite components, combining MyoArm, MyoLegs, and MyoTorso models with Hill-type muscle actuators in MuJoCo. This enables studying motor control at the neuromuscular level and realistic muscle output, rather than via idealized joint torque controllers.
Environment Summary
| Model | Type | Joints | DoF | Muscles | Focus |
|---|---|---|---|---|---|
| BimanualMuscle | Fixed-base | 76 (36*) | 126 (64*) | 54 (14*) | Upper-body manipulation |
| MyoFullBody | Free-root | 123 (83*) | 416 (354*) | 72 (32*) | Locomotion and manipulation |
$^*$ denotes configurations with finger muscles temporarily disabled.
BimanualMuscle Environment
The BimanualMuscle environment is designed for upper-body manipulation task. Explicit contacts are enabled in between both arms and with the thorax.
MyoFullBody Environment
The MyoFullBody environment provides a comprehensive full-body musculoskeletal system with full biomechanical detail and rich contact dynamics, suitable for locomotion, manipulation, and whole-body imitation. We explicitly enable additional collision pairs, such as leg–leg, arm–leg, foot-foot, to capture the required self-contact behavior, including bimanual interactions.
Getting Started
Prerequisites
The minimum required MuJoCo version for both models is mujoco==3.2.1. To use spec with the main Musclemimic environment, please use mujoco>=3.3.0.
Overview
The structure of the Musclemimic model is as follows. We use MyoFullBody as an example.
musclemimic_models/
└── model/
├── arm/
│ ├── assets/
│ └── myoarm_bimanual.xml
├── body/
│ └── myofullbody.xml
├── head/
│ └── assets/
├── leg/
│ └── assets/
├── torso/
│ └── assets/
├── meshes/
└── scene/
└── tests/
assets/: includes both the kinematics chain files and the assets definition files for each body segment that its under.meshes/: shared mesh files used across models for bones and skullsscene/: MJCF “scene” files used in both MSK as backgroundsarm/,body/,head/,leg/,torso/: model components and their associated assets/*.xml: MJCF model definition(s) (e.g.,myofullbody.xml,myoarm_bimanual.xml)test/: testing files for symmetry between bodies, geoms, sites and muscle
Usage
Via Pypi
Install:
pip install musclemimic-models
Via git clone
Clone and install editable (recommended for development):
git clone https://github.com/amathislab/musclemimic_models.git
cd musclemimic_models
pip install -e .
MSK Model Refinement and Validation
Muscle Jump and Symmetry
While building MyoFullBody and BimanualMuscle, we corrected left–right limb asymmetries and addressed several unexpected muscle-jumping behaviors. A few representative fixes are shown below.


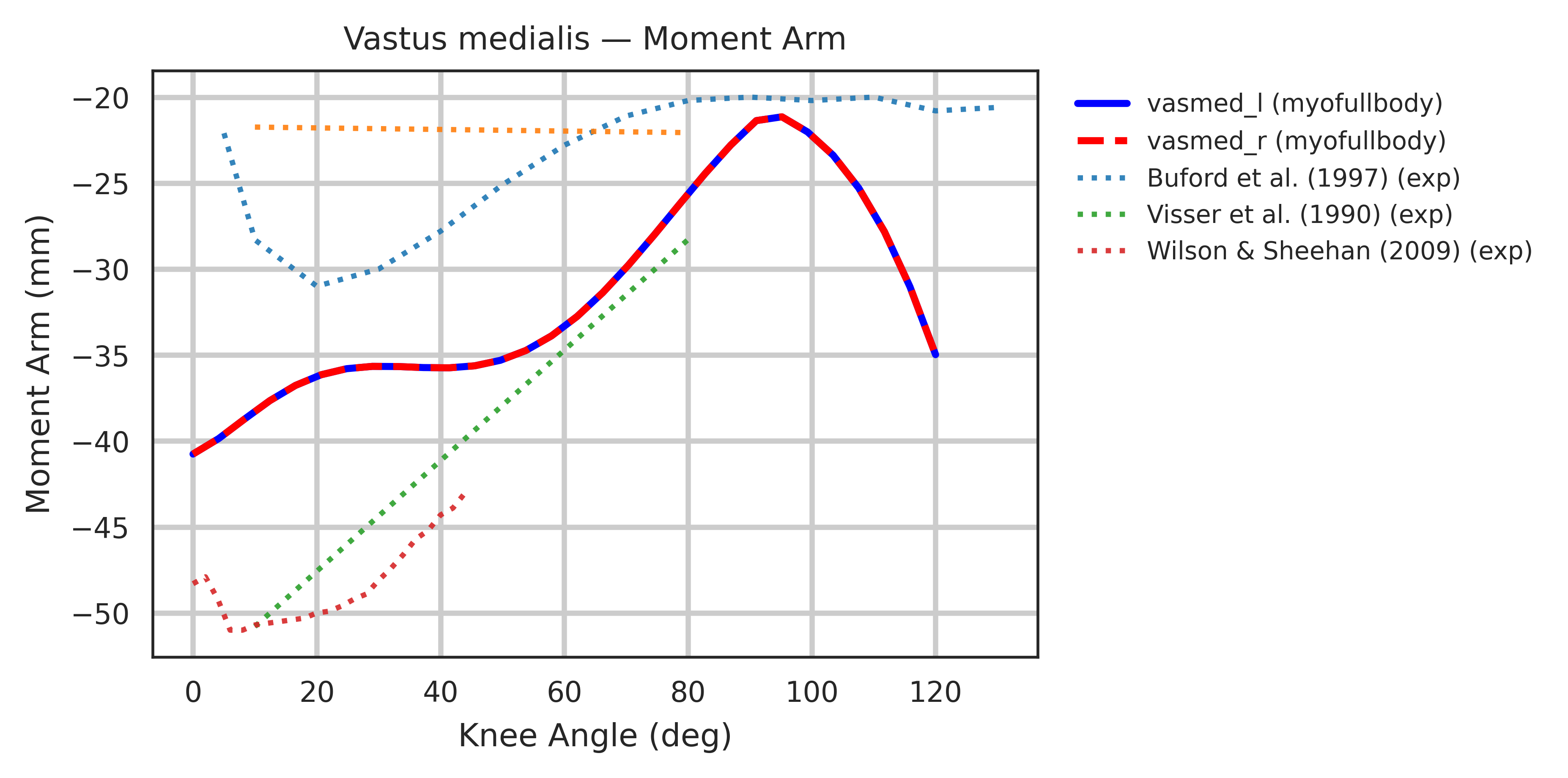
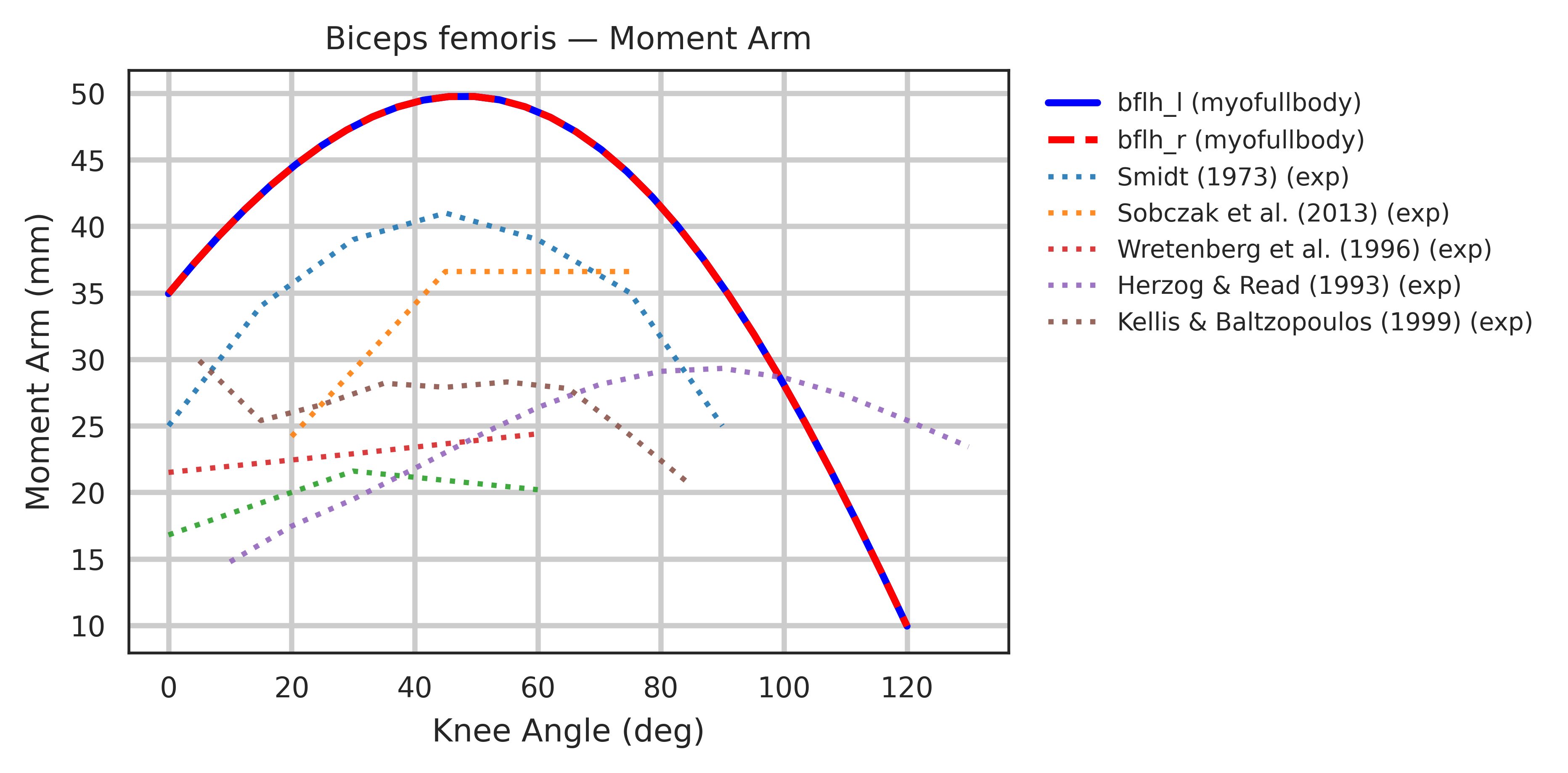
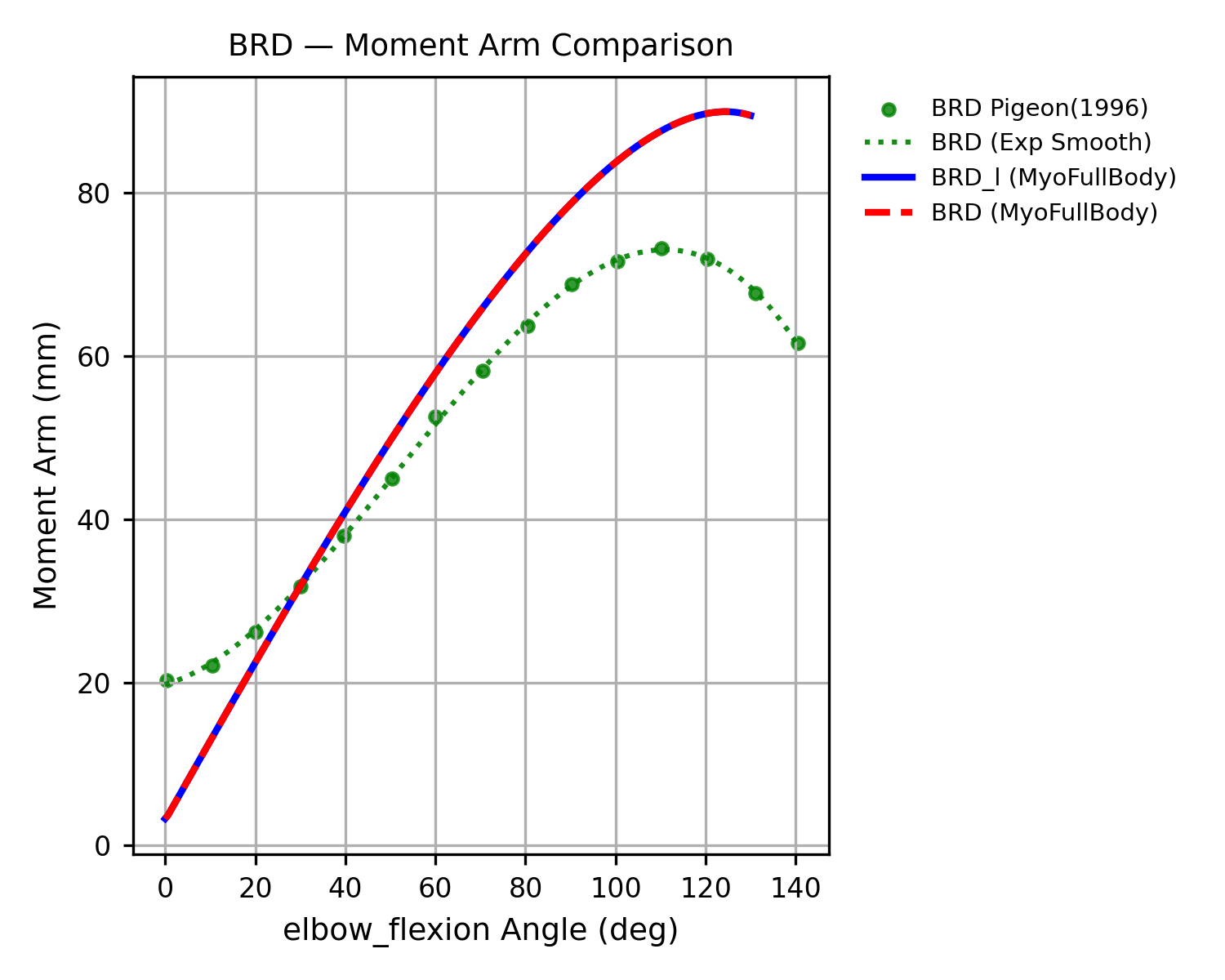
Muscle Validation
We also cross-validate the current model using previously published cadaver studies and MRI data. A few illustrative examples are included here.
License
This project is licensed under the Apache License. See the LICENSE and NOTICE files for details.
Citation
If you use MuscleMimic in your research, please cite:
@article{li2026musclemimic,
title={Towards Embodied AI with MuscleMimic: Unlocking full-body musculoskeletal motor learning at scale},
author={Li, Chengkun and Wang, Cheryl and Ziliotto, Bianca and Simos, Merkourios and Durandau, Guillaume and Mathis, Alexander},
year={2026}
}
Acknowledgements
The models in this repository build upon MyoSuite, an open-source musculoskeletal simulation framework.
Project details
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file musclemimic_models-1.0.4.tar.gz.
File metadata
- Download URL: musclemimic_models-1.0.4.tar.gz
- Upload date:
- Size: 25.9 MB
- Tags: Source
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.7
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
cb0c0df1c530fa97dc1d758f95716c5adf196e6dfbd8513bc0beed1a99dc7b72
|
|
| MD5 |
a32ddd7ac63b7bdaa942bdaa97a21fc7
|
|
| BLAKE2b-256 |
20c977a160ffe349cd938a3ffdffc942672e87de0618fcd7ea3f025861bbe7d3
|
Provenance
The following attestation bundles were made for musclemimic_models-1.0.4.tar.gz:
Publisher:
publish.yml on amathislab/musclemimic_models
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
musclemimic_models-1.0.4.tar.gz -
Subject digest:
cb0c0df1c530fa97dc1d758f95716c5adf196e6dfbd8513bc0beed1a99dc7b72 - Sigstore transparency entry: 975929710
- Sigstore integration time:
-
Permalink:
amathislab/musclemimic_models@5dad46bfb658470ecdb54c044e7abd8956433321 -
Branch / Tag:
refs/tags/v1.0.4 - Owner: https://github.com/amathislab
-
Access:
private
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@5dad46bfb658470ecdb54c044e7abd8956433321 -
Trigger Event:
release
-
Statement type:
File details
Details for the file musclemimic_models-1.0.4-py3-none-any.whl.
File metadata
- Download URL: musclemimic_models-1.0.4-py3-none-any.whl
- Upload date:
- Size: 26.0 MB
- Tags: Python 3
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.7
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
ae472d79a22c94458cf326cde81b466b74922c0e4a768524661af090ac473692
|
|
| MD5 |
0b02bcf99cf2e7ec38a5a737c6a9d1d5
|
|
| BLAKE2b-256 |
ea5acb80d76b89ff3058429b9b3ddebc4cc684516ad912b78aceebee3e852b98
|
Provenance
The following attestation bundles were made for musclemimic_models-1.0.4-py3-none-any.whl:
Publisher:
publish.yml on amathislab/musclemimic_models
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
musclemimic_models-1.0.4-py3-none-any.whl -
Subject digest:
ae472d79a22c94458cf326cde81b466b74922c0e4a768524661af090ac473692 - Sigstore transparency entry: 975929713
- Sigstore integration time:
-
Permalink:
amathislab/musclemimic_models@5dad46bfb658470ecdb54c044e7abd8956433321 -
Branch / Tag:
refs/tags/v1.0.4 - Owner: https://github.com/amathislab
-
Access:
private
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@5dad46bfb658470ecdb54c044e7abd8956433321 -
Trigger Event:
release
-
Statement type:







