PILOT: Policy-Informed Learned Optimization for Adaptive Deep Network Training

Project description
PILOT: Policy-Informed Learned Optimization for Adaptive Deep Network Training





Project Page | Paper | PyPI
PILOT is an online adaptive optimizer that adjusts its update behavior during training. Instead of applying a fixed update rule from the first step to the last, PILOT reads a gradient-direction agreement signal and reshapes the update through a lightweight learned policy — no offline search, no meta-training, no second-order estimation.
Installation
pip install pilot-optimizer
Or install from source
git clone https://github.com/SattamAltwaim/PILOT.git
cd PILOT
pip install -e .
Usage
from pilot import PILOT
optimizer = PILOT(
model.parameters(),
lr=1e-3,
betas=(0.9, 0.999),
weight_decay=1e-4,
gamma=0.95, # smoothing for agreement signal
eta_phi=0.01, # policy learning rate
degree=2 # polynomial degree
)
for batch in dataloader:
loss = criterion(model(x), y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
Key Results
CNN Architecture
| Dataset | Optimizer | Accuracy (%) ↑ | Val Loss ↓ | Loss Var. ↓ |
|---|---|---|---|---|
| FashionMNIST | Adam | 93.28 | 0.1957 | 0.0033 |
| FashionMNIST | AdamW | 93.22 | 0.1944 | 0.0034 |
| FashionMNIST | Lion | 92.91 | 0.2091 | 0.0041 |
| FashionMNIST | AdaBelief | 93.66 | 0.1822 | 0.0046 |
| FashionMNIST | PILOT (Ours) | 94.13 | 0.1719 | 0.0045 |
| CIFAR-10 | Adam | 79.91 | 0.5794 | 0.0103 |
| CIFAR-10 | Lion | 80.87 | 0.5487 | 0.0105 |
| CIFAR-10 | PILOT (Ours) | 81.94 | 0.5302 | 0.0073 |
ResNet-18 Architecture
| Dataset | Optimizer | Accuracy (%) ↑ | Val Loss ↓ | Loss Var. ↓ |
|---|---|---|---|---|
| FashionMNIST | AdaBelief | 95.33 | 0.1711 | 0.0056 |
| FashionMNIST | PILOT (Ours) | 95.71 | 0.2690 | 0.0030 |
| CIFAR-10 | Adam | 93.18 | 0.2140 | 0.0073 |
| CIFAR-10 | AdamW | 92.90 | 0.2514 | 0.0066 |
| CIFAR-10 | PILOT (Ours) | 93.42 | 0.2496 | 0.0001 |
Full results with all baselines in the paper.
Training Curves
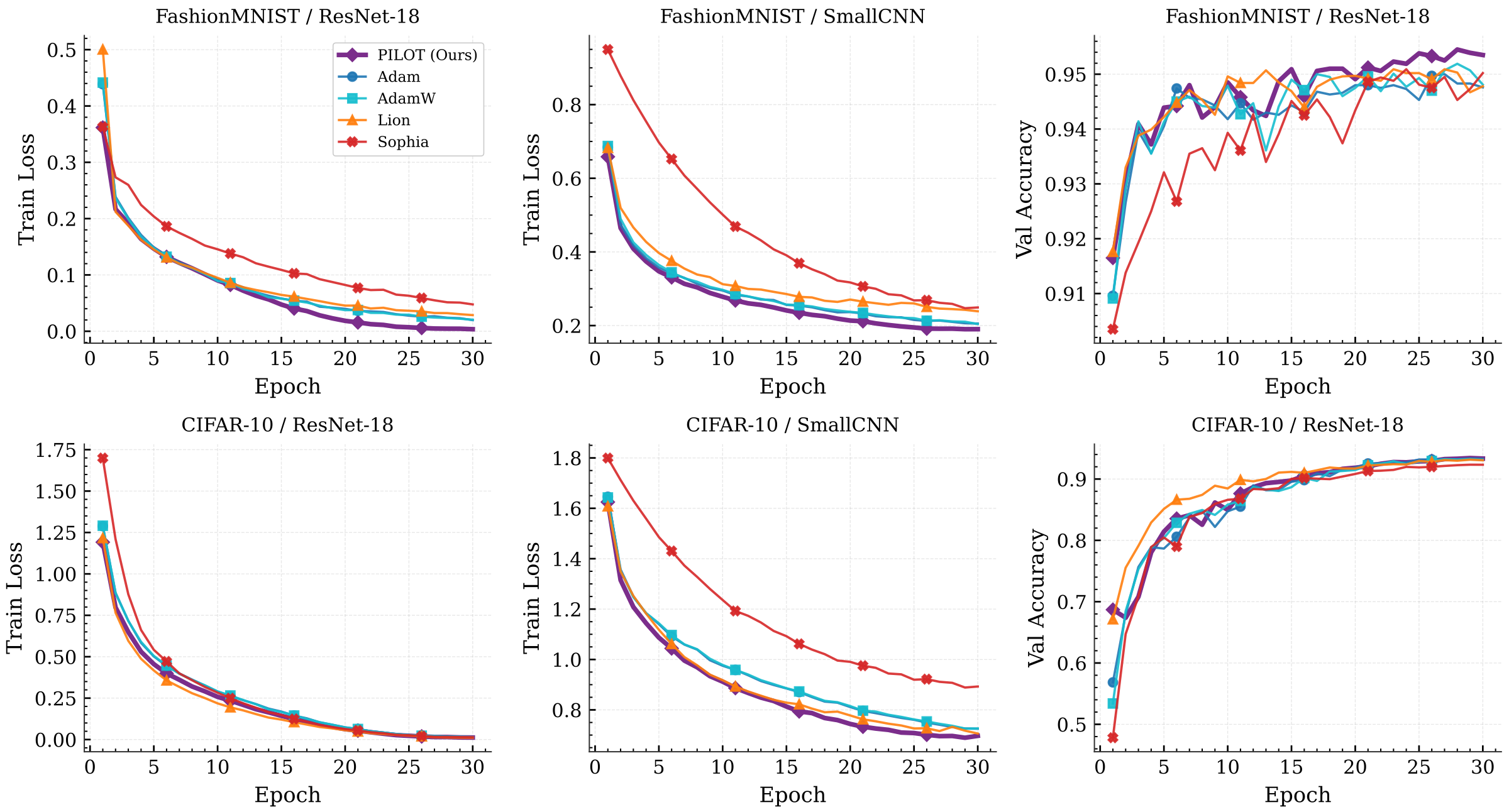
Training loss (left, middle) and validation accuracy (right) across FashionMNIST (top) and CIFAR-10 (bottom) over 30 epochs.
Loss Landscape
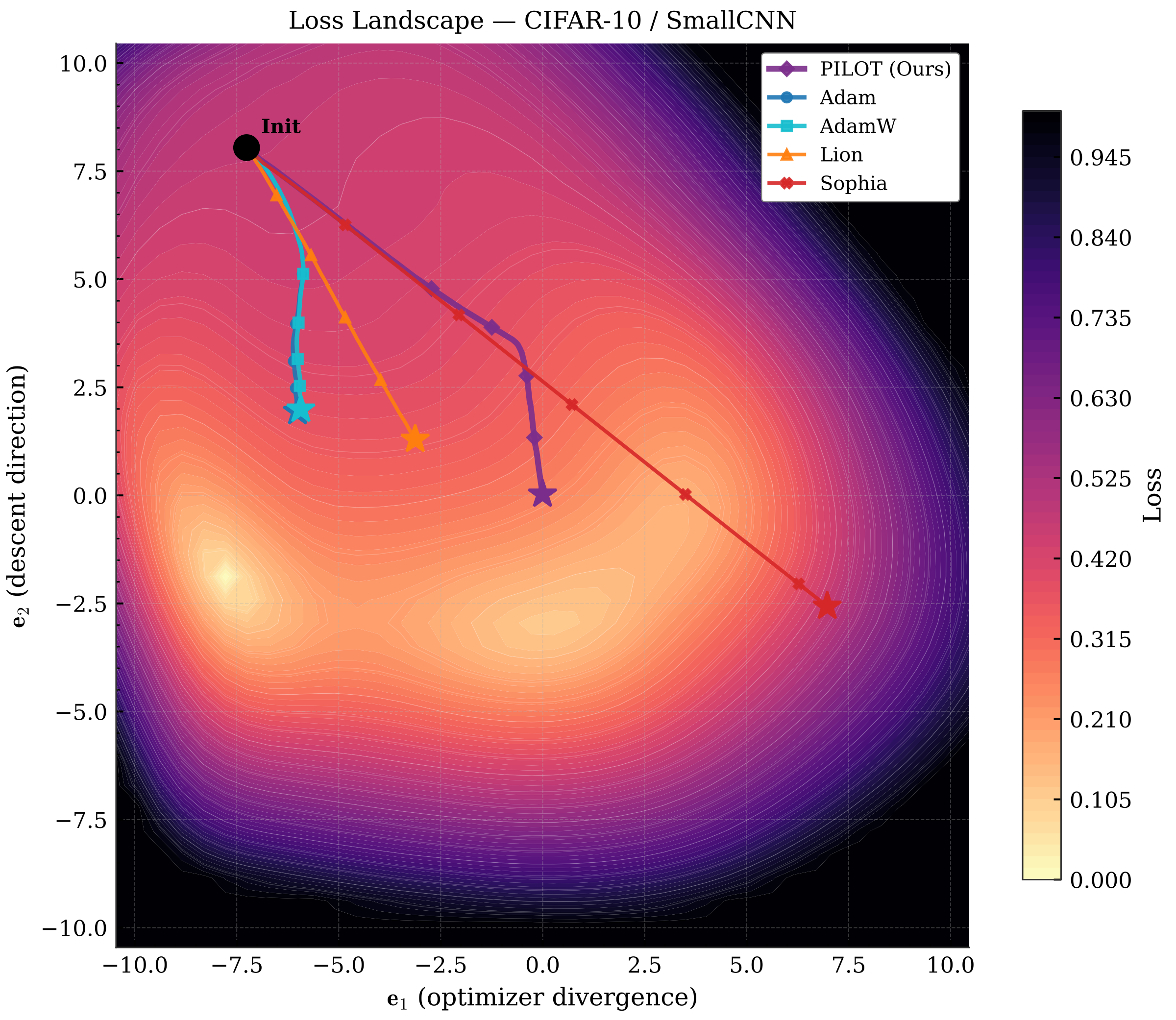
PILOT follows a distinct trajectory through the loss surface and converges to a lower-loss region compared to Adam, AdamW, Lion, and Sophia.
Method
PILOT monitors gradient-direction agreement (cosine similarity between successive gradients, smoothed into a running signal) and feeds it through a learned polynomial to produce three control knobs:
- Momentum reliance — trust the accumulated trend vs. react to the current gradient
- Variance normalization — how aggressively to apply adaptive scaling
- Sign compression — use full gradient magnitudes vs. compress toward ±1
Only 3(d+1) learnable coefficients (9 for degree 2). Initialized so PILOT starts as Adam and learns to deviate. The policy is updated each step via analytic meta-gradients at negligible cost. See the paper for the full derivation.
Hyperparameters
| Parameter | Description | Default / Range |
|---|---|---|
lr |
Learning rate | 1e-3 |
betas |
Moment coefficients | (0.9, 0.999) |
weight_decay |
Decoupled weight decay | 0.01 |
gamma |
Agreement signal smoothing | 0.85–0.99 |
eta_phi |
Policy learning rate | 5e-4–5e-2 |
degree |
Polynomial degree | 1–4 |
Tuned configurations from the paper
| Dataset | Architecture | γ | η_φ | Degree |
|---|---|---|---|---|
| CIFAR-10 | SmallCNN | 0.882 | 0.00312 | 1 |
| CIFAR-10 | ResNet-18 | 0.950 | 0.00500 | 2 |
| FashionMNIST | SmallCNN | 0.950 | 0.01000 | 2 |
| FashionMNIST | ResNet-18 | 0.957 | 0.00273 | 3 |
Selected via Bayesian optimization (TPE + ASHA early stopping, 30–40 trials).
Experiment Setup
30 epochs · cross-entropy loss · cosine annealing LR · batch size 128 · AMP · 3-epoch linear warmup for ResNet-18. Benchmarked on NVIDIA V100 GPUs. See the paper for full details.
Citation
@misc{altuuaim2026pilotpolicyinformedlearnedoptimization,
title={PILOT: Policy-Informed Learned Optimization for Adaptive Deep Network Training},
author={Sattam Altuuaim and Lama Ayash and Muhammad Mubashar and Naeemullah Khan},
year={2026},
eprint={2605.24570},
archivePrefix={arXiv},
primaryClass={cs.LG},
url={https://arxiv.org/abs/2605.24570},
}
License
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file pilot_optimizer-0.1.0.post3.tar.gz.
File metadata
- Download URL: pilot_optimizer-0.1.0.post3.tar.gz
- Upload date:
- Size: 16.0 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.13.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
bd9c6a8bcd1b08f490445d14e7f8aed0cb18a126f8c174eac299a7919150ac1d
|
|
| MD5 |
75984f207c13fc73467dc6a1f3491795
|
|
| BLAKE2b-256 |
70a5ff0d3020b8e3716482cc1bb12e1576d29f4b840f8292382c10fc57cfdcc5
|
File details
Details for the file pilot_optimizer-0.1.0.post3-py3-none-any.whl.
File metadata
- Download URL: pilot_optimizer-0.1.0.post3-py3-none-any.whl
- Upload date:
- Size: 10.9 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.13.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
c43647d3a0aa15382119ffacbe0da5d4f85b43ca5c3c72ff0efabebeb7f409b1
|
|
| MD5 |
4fc5ddaf1e136daf4ee840a4a6f4c540
|
|
| BLAKE2b-256 |
0a491545058669e7080fe7c51be5f132fd49fe24ea3a5c47a33d49fef79e6dc2
|







