The RAFCON Task Planner Plugin (RTPP) is a plugin to interface arbitrary pddl planner and automate the state machine generation process.


Project description
RAFCON Task Planner Plugin
Overview
The RAFCON Task Planner Plugin is a RAFCON plugin to interface arbitrary pddl planner such as the Fast Downward Planning System.
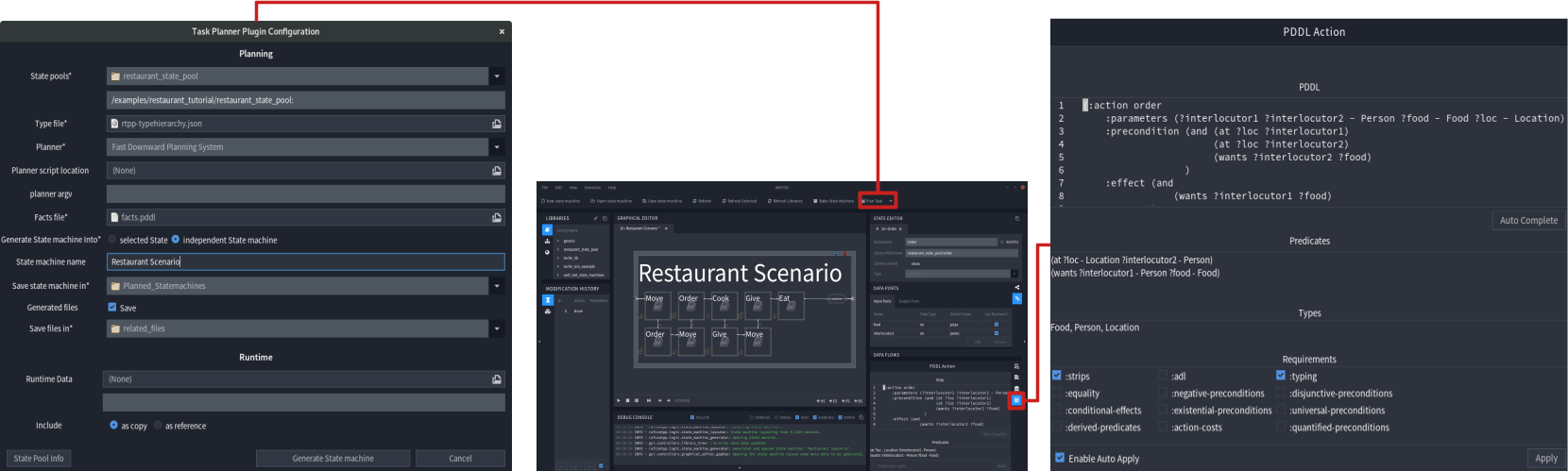
It's purpose is to use such planners to plan a predefined scenario, and generate a RAFCON state machine out of the found plan.
To achieve this, the plugin extends RAFCON, so that a state's semantic can be expressed via a pddl action. Subsequently, a set of such pddl annotated states can be used to auto-generate a domain file, find a plan for a handwritten problem and generate a state machine based on the solution.
One important aspect is that the Task Planner Plugin is able to interface abritrary planner. So new planners can be quickly integrated using a python script. This mechanism was for example used to successfully integrate the Fast Downward, as well as the Fast-Forward Planning System.

Installation
Currently the plugin is available on GitHub and PyPi. Information about how to obtain and install it from one of these platforms, is available at the homepage's Getting Started Section.
Plugin Homepage
Documentation as well as some tutorials are available at the Plugin's Homepage.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
File details
Details for the file rafcon-task-planner-plugin-1.5.2.tar.gz.
File metadata
- Download URL: rafcon-task-planner-plugin-1.5.2.tar.gz
- Upload date:
- Size: 306.5 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/1.14.0 pkginfo/1.4.2 requests/2.23.0 setuptools/44.0.0 requests-toolbelt/0.8.0 tqdm/4.23.4 CPython/2.7.13
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
624a833d19914efaffec8877d2f08d44d84263bdcd02b8a34e2e74f1fada482a
|
|
| MD5 |
4ce0291c618754dda63b894f6eff28a6
|
|
| BLAKE2b-256 |
57014abf993225722f87de552640f481aa4ae90f9056eca0bda33f4d160c4436
|







