Standalone SwarmSort real-time multi-object tracker with integrated lightweight embeddings

Project description






SwarmSort
Reliable multi-object tracking-by-detection: fast, accurate, and easy — perfect for top-view microscopy with hundreds of objects 🎯
Real-time tracking of 150 paramecia at 80 FPS |
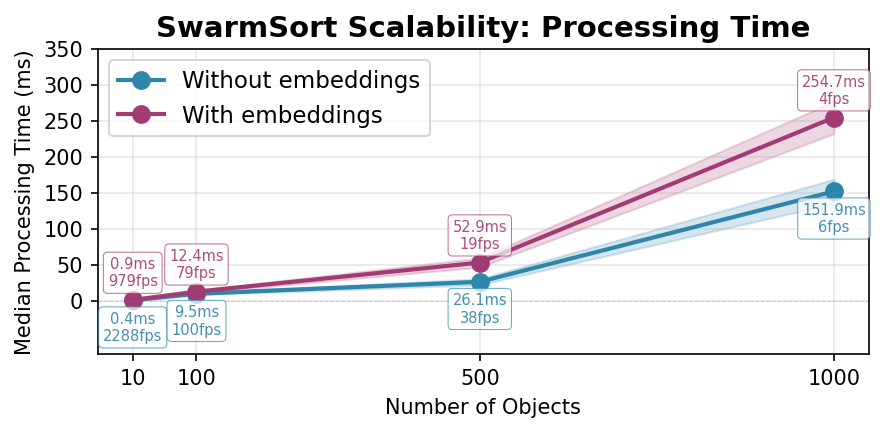
Real time performances for up to 500 individuals |
Core Capabilities
SwarmSort solves the data association problem in multi-object tracking by:
- Maintaining temporal consistency of object identities across frames using motion prediction, appearance and uncertainty
- Handling occlusions and collisions through re-identification with visual embeddings
- optional lightweight gpu based embedding integrated for more accuracy and speed
- Preventing ID switches in dense scenarios using uncertainty-aware cost computation and embedding freezing
- Fast! The library achieves real-time performance (80-100 FPS for 100 objects) through Numba JIT compilation, vectorized operations, and optional GPU acceleration.
📖 Documentation
Key Features
Advanced Tracking Algorithms
- Uncertainty-based cost system - Adaptive association costs based on track age, local density, and detection reliability
- Smart collision handling - Density-based embedding freezing prevents ID switches in crowded scenarios
- Re-identification capability - Recovers lost tracks using visual embeddings and motion prediction
- Hybrid assignment strategy - Combines greedy matching for obvious associations with Hungarian algorithm for complex cases
- Dual Kalman filter options - Simple constant velocity or OC-SORT style acceleration model
- Occlusion handling - Maintains tracks through temporary occlusions using motion prediction
Real-time performance
- Numba JIT compilation - Critical mathematical functions compiled to machine code
- Vectorized operations - Batch processing using NumPy for efficient computation
- GPU acceleration - Optional CUDA support via CuPy for embedding extraction
- Memory efficient - Bounded memory usage with automatic cleanup of stale tracks
Flexible Integration
- Detector agnostic - Works with any object detection source (YOLO, Detectron2, custom detectors)
- Configurable parameters - Fine-tune behavior for specific species (microscopy, crowds ..)
- Multiple embedding methods - Support for various visual feature extractors
- Comprehensive API - Access to track states, lifecycle management, and detailed statistics
Production Ready
- Extensive test coverage - 200+ unit tests covering edge cases and error conditions
- Cross-platform support - Tested on Linux, Windows, macOS
- Detailed documentation - Complete API reference with practical examples
Citation
If you use SwarmSort in your research, please cite:
@software{swarmsort,
title={SwarmSort: High-Performance Multi-Object Tracking},
author={Charles Fosseprez},
year={2024},
url={https://github.com/cfosseprez/swarmsort}
}
📦 Installation
# Option 1: Install from PyPI
pip install swarmsort
# Option 2: Install from PyPI with gpu embedding support
pip install swarmsort[gpu]
# Option 3: Install from GitHub
pip install git+https://github.com/cfosseprez/swarmsort.git
Quick Start
Your First Tracker in 30 Seconds
import numpy as np
from swarmsort import SwarmSortTracker, Detection
# Step 1: Create a tracker (it's that simple!)
tracker = SwarmSortTracker()
# Step 2: Tell the tracker what you detected this frame
# In real use, these would come from your object detector (YOLO, etc.)
detections = [
Detection(position=[100, 200], confidence=0.9), # A person at position (100, 200)
Detection(position=[300, 400], confidence=0.8), # Another person at (300, 400)
]
# Step 3: Get tracking results - SwarmSort handles all the complexity!
tracked_objects = tracker.update(detections)
# Step 4: Use the results - each object has a unique ID that persists across frames
for obj in tracked_objects:
print(f"Person {obj.id} is at position {obj.position} with {obj.confidence:.0%} confidence")
# Output: Person 1 is at position [100. 200.] with 90% confidence
Real-World Example: Tracking Paramecia in Video
import cv2
from swarmsort import SwarmSortTracker, Detection
tracker = SwarmSortTracker()
# Process a video file
video = cv2.VideoCapture('microscopy.mp4')
while True:
ret, frame = video.read()
if not ret:
break
# Get detections from your favorite detector
# For this example, let's say we detected 2 people:
detections = [
Detection(
position=[320, 240], # Center of bounding box
confidence=0.95,
bbox=[300, 220, 340, 260] # x1, y1, x2, y2
),
Detection(
position=[150, 180],
confidence=0.87,
bbox=[130, 160, 170, 200]
)
]
# SwarmSort assigns consistent IDs across frames
tracked = tracker.update(detections)
# Draw results on frame
for person in tracked:
if person.bbox is not None:
x1, y1, x2, y2 = person.bbox.astype(int)
# Each Paramecium keeps the same ID and color throughout the video!
color = (0, 255, 0) # Green for tracked objects
cv2.rectangle(frame, (x1, y1), (x2, y2), color, 2)
cv2.putText(frame, f"ID: {person.id}", (x1, y1-10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, color, 2)
cv2.imshow('Tracking Results', frame)
if cv2.waitKey(1) == ord('q'):
break
Using Visual Features (Embeddings) for Better Tracking
SwarmSort can use your GPU for fast lightweight embedding (Optional) Or embeddings can be directly passed in the Detection.
Embeddings help the tracker recognize objects by their appearance, not just position. This is super useful when:
- Objects move quickly or unpredictably
- Multiple similar objects are close together
- Objects temporarily disappear and reappear
from swarmsort import SwarmSortTracker, SwarmSortConfig, Detection
import numpy as np
# Enable appearance-based tracking
config = SwarmSortConfig(
do_embeddings=True, # Use visual features for matching
embedding_weight=1.0, # How much to trust appearance vs motion
)
tracker = SwarmSortTracker(config)
# In practice, embeddings come from a feature extractor (ResNet, etc.)
# Here's a simple example:
def get_embedding_from_image(image_patch):
"""Your feature extractor - could be a neural network"""
# This would be your CNN/feature extractor
# Returns a N-dimensional feature vector
return np.random.randn(128).astype(np.float32)
# Create detection with visual features
person_image = frame[160:200, 130:170] # Crop person from frame
embedding = get_embedding_from_image(person_image)
detection = Detection(
position=[150, 180], # Center position
confidence=0.9,
embedding=embedding, # Visual features help maintain ID
bbox=[130, 160, 170, 200] # Bounding box
)
# The tracker now uses BOTH motion AND appearance for matching!
tracked_objects = tracker.update([detection])
⚙️ Configuration Made Easy
Understanding the max_distance Parameter
The max_distance parameter is the foundation of SwarmSort's configuration. Important: Set it 1.5-2x higher than the expected maximum pixel movement between frames because:
- The actual matching uses a combination of spatial distance, embedding similarity, and uncertainty penalties
- With embeddings enabled, the effective matching distance is reduced by visual similarity
- Uncertainty penalties further modify the association costs
- Example: If objects move up to 100 pixels between frames, set
max_distance=150-200
Many other parameters automatically scale with max_distance:
# When you set max_distance=150, these defaults are automatically set:
local_density_radius = 150 # Same as max_distance
greedy_threshold = 30 # max_distance / 5
reid_max_distance = 150 # Same as max_distance
All Parameters
| Parameter | Default | Description |
|---|---|---|
| Core Tracking | ||
max_distance |
150.0 | Maximum distance for detection-track association |
detection_conf_threshold |
0.0 | Minimum confidence for detections |
max_track_age |
30 | Maximum frames to keep track alive without detections |
| Motion prediction | ||
kalman_type |
'simple' | Kalman filter type: 'simple' or 'oc' (OC-SORT style) |
| Uncertainty System | ||
uncertainty_weight |
0.33 | Weight for uncertainty penalties (0 = disabled) |
local_density_radius |
max_distance | Radius for computing local track density (defaults to max_distance) |
| Embeddings | ||
do_embeddings |
True | Whether to use embedding features |
embedding_function |
'cupytexture' | Integrated embedding function: "cupytexture", "cupytexture_color", "mega_cupytexture" |
embedding_weight |
1.0 | Weight for embedding similarity in cost function |
max_embeddings_per_track |
15 | Maximum embeddings stored per track |
embedding_matching_method |
'weighted_average' | Method for multi-embedding matching |
| Collision Handling | ||
collision_freeze_embeddings |
True | Freeze embedding updates in dense areas |
embedding_freeze_density |
1 | Freeze when ≥N tracks within radius |
| Assignment Strategy | ||
assignment_strategy |
'hybrid' | Assignment method: 'hungarian', 'greedy', or 'hybrid' |
greedy_threshold |
max_distance/5 | Distance threshold for greedy assignment |
| Track Initialization | ||
min_consecutive_detections |
6 | Minimum consecutive detections to create track |
max_detection_gap |
2 | Maximum gap between detections |
pending_detection_distance |
max_distance | Distance threshold for pending detection matching |
| Re-identification | ||
reid_enabled |
True | Enable re-identification of lost tracks |
reid_max_distance |
max_distance*1.5 | Maximum distance for ReID |
reid_embedding_threshold |
0.3 | Embedding threshold for ReID |
| Experimental | ||
use_probabilistic_costs |
False | Use gaussian fusion for cost computation |
🎯 Preset Configurations for Common Scenarios
Best Settings for Performance:
For good balance (speed + accuracy): up to 300 individuals
config = SwarmSortConfig(
kalman_type="simple", # Fast but accurate enough
assignment_strategy="hybrid", # Good balance
uncertainty_weight=0.33, # Some uncertainty handling
do_embeddings=True, # Use embeddings if available
reid_enabled=False, # Skip for speed
)
For maximum speed across all scales: 300+ individuals
config = SwarmSortConfig(
kalman_type="simple", # Fastest Kalman filter
assignment_strategy="greedy", # Fastest assignment
uncertainty_weight=0.0, # Disable uncertainty
do_embeddings=False, # No embeddings
reid_enabled=False, # No re-identification
)
🔧 Understanding Key Parameters
# The most important parameters to tune:
config = SwarmSortConfig(
# 1. How far can an object move between frames?
max_distance=150.0, # Increase for fast objects, decrease for slow
# 2. How many frames to confirm a new track?
min_consecutive_detections=6, # Lower = faster response, more false positives
# Higher = slower response, fewer false positives
# 3. How long to keep lost tracks?
max_track_age=30, # At 30 FPS, this is 1 second of "memory"
# 4. Use appearance features?
do_embeddings=True, # True if objects look different from each other
# False if all objects look the same (e.g., identical boxes)
# 5. How to handle crowded scenes?
collision_freeze_embeddings=True, # Prevents ID switches when objects touch
uncertainty_weight=0.33, # Higher = more conservative in uncertain situations
)
Advanced Usage
Different Configuration Methods
from swarmsort import SwarmSortTracker, SwarmSortConfig
# Default tracker
tracker = SwarmSortTracker()
# With configuration object
config = SwarmSortConfig(max_distance=100.0, do_embeddings=True)
tracker = SwarmSortTracker(config)
# With dictionary config
tracker = SwarmSortTracker({'max_distance': 100.0, 'do_embeddings': True})
Basic Standalone Usage
from swarmsort import SwarmSortTracker, SwarmSortConfig
# SwarmSort is a standalone tracker - no special integration needed
tracker = SwarmSortTracker()
# Configure for specific use cases
config = SwarmSortConfig(
do_embeddings=True,
reid_enabled=True,
max_distance=100.0,
assignment_strategy='hybrid', # Use hybrid assignment strategy
uncertainty_weight=0.33 # Enable uncertainty-based costs
)
tracker_configured = SwarmSortTracker(config)
📦 Working with Data
Input: Detection Objects
Detections are what you feed into the tracker - they represent objects found in the current frame:
from swarmsort import Detection
import numpy as np
# Minimal detection - just position and confidence
simple_detection = Detection(
position=[320, 240], # Center point (x, y)
confidence=0.9 # How sure are we this is real? (0-1)
)
# Full detection with all the bells and whistles
full_detection = Detection(
position=np.array([320, 240]), # Object center
confidence=0.95, # Detection confidence
bbox=np.array([300, 220, 340, 260]), # Bounding box [x1, y1, x2, y2]
embedding=feature_vector, # Visual features (for example from your CNN)
class_id=0, # 0=person, 1=car, etc.
id="yolo_detection_42" # Your detector's ID (optional)
)
# Real-world example: Converting YOLO output to SwarmSort
def yolo_to_swarmsort(yolo_results):
detections = []
for box in yolo_results.boxes:
x1, y1, x2, y2 = box.xyxy[0].numpy()
center_x = (x1 + x2) / 2
center_y = (y1 + y2) / 2
detections.append(Detection(
position=[center_x, center_y],
confidence=box.conf[0].item(),
bbox=[x1, y1, x2, y2],
class_id=int(box.cls[0])
))
return detections
Output: TrackedObject Results
The tracker returns TrackedObject instances with rich information about each tracked object:
# Get tracking results
tracked_objects = tracker.update(detections)
for obj in tracked_objects:
# Identity
print(f"🆔 Track ID: {obj.id}") # Unique ID that persists across frames
# Location & Motion
print(f"📍 Position: {obj.position}") # Current [x, y] position
print(f"➡️ Velocity: {obj.velocity}") # Speed and direction [vx, vy]
# Confidence & Quality
print(f"✅ Confidence: {obj.confidence:.1%}") # How confident are we?
print(f"📊 Track quality: {obj.hits}/{obj.age}") # Hits/Age ratio
# Track Status
if obj.time_since_update == 0:
print("🟢 Currently visible")
else:
print(f"🟡 Lost for {obj.time_since_update} frames")
# Bounding Box (if available)
if obj.bbox is not None:
x1, y1, x2, y2 = obj.bbox
width = x2 - x1
height = y2 - y1
print(f"📐 Size: {width:.0f}x{height:.0f} pixels")
🔄 Track Lifecycle Management
SwarmSort provides fine control over track states - perfect for different visualization needs:
# Get only tracks that are currently visible
alive_tracks = tracker.update(detections)
print(f"👁️ Visible now: {len(alive_tracks)} objects")
# Get tracks that were recently lost (useful for smooth visualization)
recently_lost = tracker.get_recently_lost_tracks(max_frames_lost=5)
print(f"👻 Recently lost: {len(recently_lost)} objects")
# Get everything (visible + recently lost)
all_active = tracker.get_all_active_tracks(max_frames_lost=5)
print(f"📊 Total active: {len(all_active)} objects")
# Example: Different visualization for different states
for obj in alive_tracks:
draw_solid_box(frame, obj, color='green') # Solid box for visible
for obj in recently_lost:
draw_dashed_box(frame, obj, color='yellow') # Dashed box for lost
⚡ Performance & Optimization
Why SwarmSort is Fast
SwarmSort is optimized for real-world performance:
- Numba JIT Compilation: Math operations run at C speed
- Vectorized NumPy: Batch operations instead of loops
- Smart Caching: Reuses computed embeddings and distances
- Memory Pooling: Reduces allocation overhead
- Early Exit Logic: Skips unnecessary computations
Visualization Example
SwarmSort includes built-in visualization utilities for beautiful tracking displays:
Click to expand code example
import cv2
import numpy as np
from swarmsort import SwarmSortTracker, Detection, SwarmSortConfig
from swarmsort import TrackingVisualizer, VisualizationConfig
# Initialize tracker with your preferred settings
config = SwarmSortConfig(
do_embeddings=True,
embedding_function='cupytexture', # or 'mega_cupytexture' for more features
assignment_strategy='hybrid',
uncertainty_weight=0.33
)
tracker = SwarmSortTracker(config)
# Initialize visualizer with custom settings
vis_config = VisualizationConfig(
show_trails=True,
trail_length=30,
show_ids=True,
show_confidence=True,
show_velocity_vectors=True,
id_font_scale=0.5,
id_thickness=2,
box_thickness=2
)
visualizer = TrackingVisualizer(vis_config)
# Example usage with video
cap = cv2.VideoCapture('video.mp4') # Or use 0 for webcam
while True:
ret, frame = cap.read()
if not ret:
break
# Detect objects (replace with your detector)
# Here's a mock detection for demonstration
detections = [
Detection(
position=np.array([100, 200]),
confidence=0.9,
bbox=np.array([80, 180, 120, 220])
),
Detection(
position=np.array([300, 400]),
confidence=0.85,
bbox=np.array([280, 380, 320, 420])
)
]
# Update tracker
tracked_objects = tracker.update(detections)
# Draw tracking results with built-in visualizer
frame = visualizer.draw_tracks(frame, tracked_objects)
# Optionally show recently lost tracks
recently_lost = tracker.get_recently_lost_tracks(max_frames_lost=5)
frame = visualizer.draw_lost_tracks(frame, recently_lost)
# Display frame
cv2.imshow('SwarmSort Tracking', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
Quick Visualization (One-liner)
For quick prototyping, use the convenience function:
from swarmsort import quick_visualize
# One line to visualize tracking results!
frame_with_tracks = quick_visualize(frame, tracked_objects, show_trails=True)
Custom Drawing (If you need more control)
If you prefer to implement custom visualization:
Click to expand code example
import cv2
import numpy as np
from swarmsort import SwarmSortTracker, Detection, SwarmSortConfig
# Initialize tracker
tracker = SwarmSortTracker(SwarmSortConfig(do_embeddings=True))
# Function to draw tracking results
def draw_tracks(frame, tracked_objects, show_trails=True):
"""Draw bounding boxes and tracking information on frame."""
# Store trail history (in production, store this outside the function)
if not hasattr(draw_tracks, 'trails'):
draw_tracks.trails = {}
for obj in tracked_objects:
# Get track color (consistent color per ID)
color = np.random.RandomState(obj.id).randint(0, 255, 3).tolist()
# Draw bounding box if available
if obj.bbox is not None:
x1, y1, x2, y2 = obj.bbox.astype(int)
cv2.rectangle(frame, (x1, y1), (x2, y2), color, 2)
# Draw track ID and confidence
label = f"ID:{obj.id} ({obj.confidence:.2f})"
cv2.putText(frame, label, (x1, y1-10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, color, 2)
# Draw center point
cx, cy = obj.position.astype(int)
cv2.circle(frame, (cx, cy), 5, color, -1)
# Update and draw trail
if show_trails:
if obj.id not in draw_tracks.trails:
draw_tracks.trails[obj.id] = []
draw_tracks.trails[obj.id].append((cx, cy))
# Keep only last 30 points
draw_tracks.trails[obj.id] = draw_tracks.trails[obj.id][-30:]
# Draw trail
points = draw_tracks.trails[obj.id]
for i in range(1, len(points)):
cv2.line(frame, points[i-1], points[i], color, 2)
# Clean up old trails
active_ids = {obj.id for obj in tracked_objects}
draw_tracks.trails = {k: v for k, v in draw_tracks.trails.items()
if k in active_ids}
return frame
Simple Visualization with Matplotlib
For a simpler visualization or for Jupyter notebooks:
Click to expand code example
import matplotlib.pyplot as plt
import matplotlib.patches as patches
from matplotlib.animation import FuncAnimation
import numpy as np
from swarmsort import SwarmSortTracker, Detection
# Create figure
fig, ax = plt.subplots(figsize=(10, 8))
ax.set_xlim(0, 640)
ax.set_ylim(480, 0) # Invert y-axis for image coordinates
ax.set_aspect('equal')
ax.set_title('SwarmSort Multi-Object Tracking')
tracker = SwarmSortTracker()
track_history = {}
def update_plot(frame_num):
ax.clear()
ax.set_xlim(0, 640)
ax.set_ylim(480, 0)
ax.set_title(f'Frame {frame_num}')
# Generate mock detections (replace with real detections)
detections = [
Detection(
position=np.array([320 + 100*np.sin(frame_num/10), 240]),
confidence=0.9,
bbox=np.array([300 + 100*np.sin(frame_num/10), 220,
340 + 100*np.sin(frame_num/10), 260])
),
Detection(
position=np.array([200, 240 + 100*np.cos(frame_num/10)]),
confidence=0.85,
bbox=np.array([180, 220 + 100*np.cos(frame_num/10),
220, 260 + 100*np.cos(frame_num/10)])
)
]
# Update tracker
tracked_objects = tracker.update(detections)
# Plot tracked objects
for obj in tracked_objects:
# Get consistent color for track ID
np.random.seed(obj.id)
color = np.random.rand(3)
# Draw bounding box
if obj.bbox is not None:
x1, y1, x2, y2 = obj.bbox
rect = patches.Rectangle((x1, y1), x2-x1, y2-y1,
linewidth=2, edgecolor=color,
facecolor='none')
ax.add_patch(rect)
# Draw center point
ax.scatter(obj.position[0], obj.position[1],
c=[color], s=100, marker='o')
# Add ID label
ax.text(obj.position[0], obj.position[1]-20, f'ID:{obj.id}',
color=color, fontsize=12, ha='center', weight='bold')
# Update history
if obj.id not in track_history:
track_history[obj.id] = []
track_history[obj.id].append(obj.position.copy())
# Draw trail
if len(track_history[obj.id]) > 1:
trail = np.array(track_history[obj.id])
ax.plot(trail[:, 0], trail[:, 1], color=color,
linewidth=2, alpha=0.5)
# Clean old tracks
active_ids = {obj.id for obj in tracked_objects}
for track_id in list(track_history.keys()):
if track_id not in active_ids:
if len(track_history[track_id]) > 50: # Remove very old tracks
del track_history[track_id]
# Create animation
anim = FuncAnimation(fig, update_plot, frames=200,
interval=50, repeat=True)
plt.show()
# To save as video:
# anim.save('tracking_visualization.mp4', writer='ffmpeg', fps=20)
🚀 Advanced Features
🧠 How SwarmSort Thinks: The Intelligence Behind the Tracking
Uncertainty-Aware Tracking
SwarmSort knows when it's confident and when it's not:
# The tracker automatically adjusts behavior based on uncertainty:
# - New tracks: "I'm not sure yet, let me observe more"
# - Established tracks: "I know this object well"
# - Crowded areas: "Need to be extra careful here"
config = SwarmSortConfig(
uncertainty_weight=0.33, # How much to consider uncertainty
# 0.0 = Ignore uncertainty (aggressive)
# 0.5 = Balanced approach
# 1.0 = Very conservative
)
# Example: High uncertainty for drone tracking (unpredictable motion)
drone_config = SwarmSortConfig(
uncertainty_weight=0.6, # Be more careful with uncertain tracks
kalman_type='oc', # Better motion model for erratic movement
)
Smart Collision Prevention
Prevents ID switches when objects get close:
# Scenario: Tracking dancers who frequently cross paths
dance_config = SwarmSortConfig(
collision_freeze_embeddings=True, # Lock visual features when close
embedding_freeze_density=1, # Freeze when anyone is within...
local_density_radius=100.0, # ...100 pixels
)
# What happens:
# 1. Two Paramecium approach each other
# 2. SwarmSort detects they're getting close
# 3. Visual features are "frozen" - relies on motion only
# 4. Prevents mixing up their identities
# 5. Once separated, visual matching resumes
Hybrid Assignment Strategy
Combines the best of both worlds:
config = SwarmSortConfig(
assignment_strategy='hybrid', # Smart mode (default)
greedy_threshold=30.0, # Fast matching for obvious cases
)
# How it works:
# 1. Obvious matches (very close): Uses fast greedy assignment
# 2. Ambiguous cases: Falls back to optimal Hungarian algorithm
# 3. Best of both: Fast AND accurate
config.assignment_strategy = 'hybrid' # optimal matching
🔍 Re-Identification: Bringing Lost Objects Back
Perfect for scenarios where objects temporarily disappear:
# Example: Security camera at a store entrance
config = SwarmSortConfig(
reid_enabled=True, # Enable re-identification
reid_max_distance=200.0, # Search this far for lost tracks
reid_embedding_threshold=0.25, # How similar must appearances be?
)
# What happens:
# 1. Person walks behind a pillar (track lost)
# 2. Person reappears on the other side
# 3. SwarmSort compares appearance with recently lost tracks
# 4. Same person? Same ID! Tracking continues seamlessly
# Real-world usage:
tracker = SwarmSortTracker(config)
results = tracker.update(detections)
# The person who disappeared at frame 100 and reappeared at frame 120
# will have the SAME track ID - perfect for counting and analytics!
🔧 Troubleshooting & FAQ
Common Issues and Solutions
Q: My tracks keep switching IDs when objects cross paths
# Solution: Enable collision handling
config = SwarmSortConfig(
collision_freeze_embeddings=True, # Prevent ID switches
embedding_freeze_density=1, # Freeze when objects are close
do_embeddings=True, # Use visual features
embedding_weight=1.5, # Trust appearance more
)
Q: New tracks take too long to appear
# Solution: Reduce initialization requirements
config = SwarmSortConfig(
min_consecutive_detections=2, # Was 6, now faster
init_conf_threshold=0.3, # Accept lower confidence
)
Q: Too many false tracks from noise
# Solution: Be more strict about track creation
config = SwarmSortConfig(
min_consecutive_detections=8, # Require more detections
init_conf_threshold=0.7, # Higher confidence needed
detection_conf_threshold=0.5, # Filter out weak detections
)
Q: Tracks disappear too quickly
# Solution: Keep tracks alive longer
config = SwarmSortConfig(
max_track_age=30, # Keep for 2 seconds at 30 FPS (was 30)
reid_enabled=True, # Try to re-identify lost tracks
)
Q: Performance is too slow Consider processing every other frame
Examples
See the examples/ directory for comprehensive usage examples.
Testing
# Run tests
poetry run pytest
# Run tests with coverage
poetry run pytest --cov=swarmsort --cov-report=html
# Run specific test
poetry run pytest tests/test_basic.py::test_basic_tracking
Development
Development Setup
Want to contribute or modify SwarmSort? Here's how to set up a development environment:
# Clone the repository
git clone https://github.com/cfosseprez/swarmsort.git
cd swarmsort
# Install with Poetry (recommended for development)
poetry install --with dev
# Or use pip in editable mode
pip install -e ".[dev]"
Benchmarking
# Run benchmarks
poetry run pytest tests/ --benchmark-only
License
GPL 3.0 or later - see LICENSE file for details.
Contributing
- Fork the repository
- Create a feature branch (
git checkout -b feature/amazing-feature) - Commit your changes (
git commit -m 'Add amazing feature') - Push to the branch (
git push origin feature/amazing-feature) - Open a Pull Request
Development Workflow
# Install development dependencies
poetry install --with dev
# Run linting
poetry run black swarmsort/
poetry run flake8 swarmsort/
# Run type checking
poetry run mypy swarmsort/


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file swarmsort-1.0.0.tar.gz.
File metadata
- Download URL: swarmsort-1.0.0.tar.gz
- Upload date:
- Size: 137.6 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/2.1.4 CPython/3.11.9 Windows/10
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
237c17605d4448ed5907f16596b0d864d390c69b37c518710c4efa177391342c
|
|
| MD5 |
5c2a2f8cd0ba3408dcd446709ea138cc
|
|
| BLAKE2b-256 |
a088d597118ef020848443901907d334a96e7678747b7b988a82333a708c8170
|
File details
Details for the file swarmsort-1.0.0-py3-none-any.whl.
File metadata
- Download URL: swarmsort-1.0.0-py3-none-any.whl
- Upload date:
- Size: 135.5 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/2.1.4 CPython/3.11.9 Windows/10
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
9e75d1561248355bf0b06e587fc3fedd0bd66fe7b7e52a58f14d27eb3eca0003
|
|
| MD5 |
bd504f9bfdf9c7148aa21dab0395d759
|
|
| BLAKE2b-256 |
af1cde95ee3a115e51cb0c89b14de47c5a0e3c28873ea42f5271c7a1ac98a086
|







