Official Python SDK for the Wandelbots Nova

Project description
wandelbots-nova (Python SDK)




This library provides an SDK for the Wandelbots NOVA API.
The SDK will help you to build your own apps and services using Python on top of NOVA and makes programming a robot as easy as possible.
https://github.com/user-attachments/assets/f6157e4b-eea8-4b96-b302-1f3864ae44a9
Background
Wandelbots NOVA is an agnostic robot operating system that enables developers to virtually plan their industrial six-axis robot fleet, as well as to program, control and operate your robots on the shopfloor - all independent on the robot brand and through a unified API. It combines modern development tools (Python, JavaScript APIs) with an AI-driven approach to robot control and motion planning, enabling developers to build applications like gluing, grinding, welding, and palletizing without worrying about underlying hardware differences. The holistic software offers a variety of tools to create unique automation solutions along the whole automation process.
Prerequisites
- A running Nova instance (apply for access at wandelbots.com)
- Valid Nova API credentials
- Python >=3.10
Installation
Install the library using pip:
pip install wandelbots-nova
Recommended: uv project and Rerun Visualization
Firstly you need to install uv to your system.
Initialize a new uv project with the following command.
uv init
We recommend installing the library with the nova-rerun-bridge extra to make usage of the visualization tool rerun.
See the extension README.md for further details.
uv add wandelbots-nova --extra nova-rerun-bridge
You need to download the robot models to visualize the robot models in the rerun viewer.
uv run download-models
Wandelscript
Wandelscript is a domain-specific language for programming robots. It is a declarative language that allows you to describe the robot's behavior in a high-level way.
uv add wandelbots-nova --extra wandelscript
Here is a simple example of a Wandelscript program:
robot = get_controller("controller")[0]
tcp("Flange")
home = read(robot, "pose")
sync
# Set the velocity of the robot to 200 mm/s
velocity(200)
for i = 0..3:
move via ptp() to home
# Move to a pose concatenating the home pose
move via line() to (50, 20, 30, 0, 0, 0) :: home
move via line() to (100, 20, 30, 0, 0, 0) :: home
move via line() to (50, 20, 30, 0, 0, 0) :: home
move via ptp() to home
To get more information about Wandelscript, check out the Wandelscript documentation.
Novax
Novax is an app framework for building server applications on top of NOVA. It provides common core concepts like the handling of programs and their execution.
uv add wandelbots-nova --extra novax
To use Novax in your application, you need to create a new Novax instance as an entrypoint.
from pathlib import Path
import uvicorn
from novax import Novax
@nova.program()
def simple_program():
print("Hello World!")
def main(host: str = "0.0.0.0", port: int = 8000):
# Create a new Novax instance
novax = Novax()
# Create a new FastAPI app
app = novax.create_app()
# Include the programs router
novax.include_programs_router(app)
# Register Python programs (existing functionality)
novax.register_program(simple_program)
# You can also register wandelscript files
novax.register_program(Path(__file__).parent / "programs" / "program2.ws")
# Serve the FastAPI app
uvicorn.run(
app,
host=host,
port=port,
reload=False,
log_level=log_level,
proxy_headers=True,
forwarded_allow_ips="*",
)
Now you can inspect the API at http://localhost:8000/docs.
🚀 Quick Start
See the examples for usage of this library including 3D visualization.
For more details check out the technical wiki (powered by deepwiki), the official documentation or the code documentation.
Usage
Import the library in your code to get started.
from nova import Nova
The SDK also includes an auto-generated API client for the NOVA API. You can access the API client using the api module.
from nova import api
Checkout the basic and plan_and_execute examples to learn how to use the library.
In this directory are more examples to explain the advanced usage of the SDK. For 3D visualization examples, see the main examples folder. Advanced rerun integration examples are in the nova_rerun_bridge examples folder.
Examples
Basic Usage
import nova
from nova import Nova
from nova.program import ProgramPreconditions
from nova.cell import virtual_controller
@nova.program(
preconditions=ProgramPreconditions(
controllers=[
virtual_controller(
name="ur10",
manufacturer=api.models.Manufacturer.UNIVERSALROBOTS,
type=api.models.VirtualControllerTypes.UNIVERSALROBOTS_MINUS_UR10E,
),
virtual_controller(
name="kuka",
manufacturer=api.models.Manufacturer.KUKA,
type=api.models.VirtualControllerTypes.KUKA_MINUS_KR16_R1610_2,
),
],
)
)
async def main():
async with Nova() as nova:
cell = nova.cell()
ur10 = await cell.controller("ur10")
kuka = await cell.controller("kuka")
async with ur10[0] as motion_group:
tcp = "Flange"
home_joints = await motion_group.joints()
current_pose = await motion_group.tcp_pose(tcp)
Robot Motion Examples
- Simple Point-to-Point Movement
import nova
from nova import Nova
from nova.actions import cartesian_ptp, joint_ptp
from nova.types import Pose
@nova.program()
async def main():
async with Nova() as nova:
actions = [
joint_ptp(home_joints),
cartesian_ptp(current_pose @ Pose((100, 0, 0, 0, 0, 0))), # Move 100mm in X
joint_ptp(home_joints)
]
trajectory = await motion_group.plan(actions, tcp)
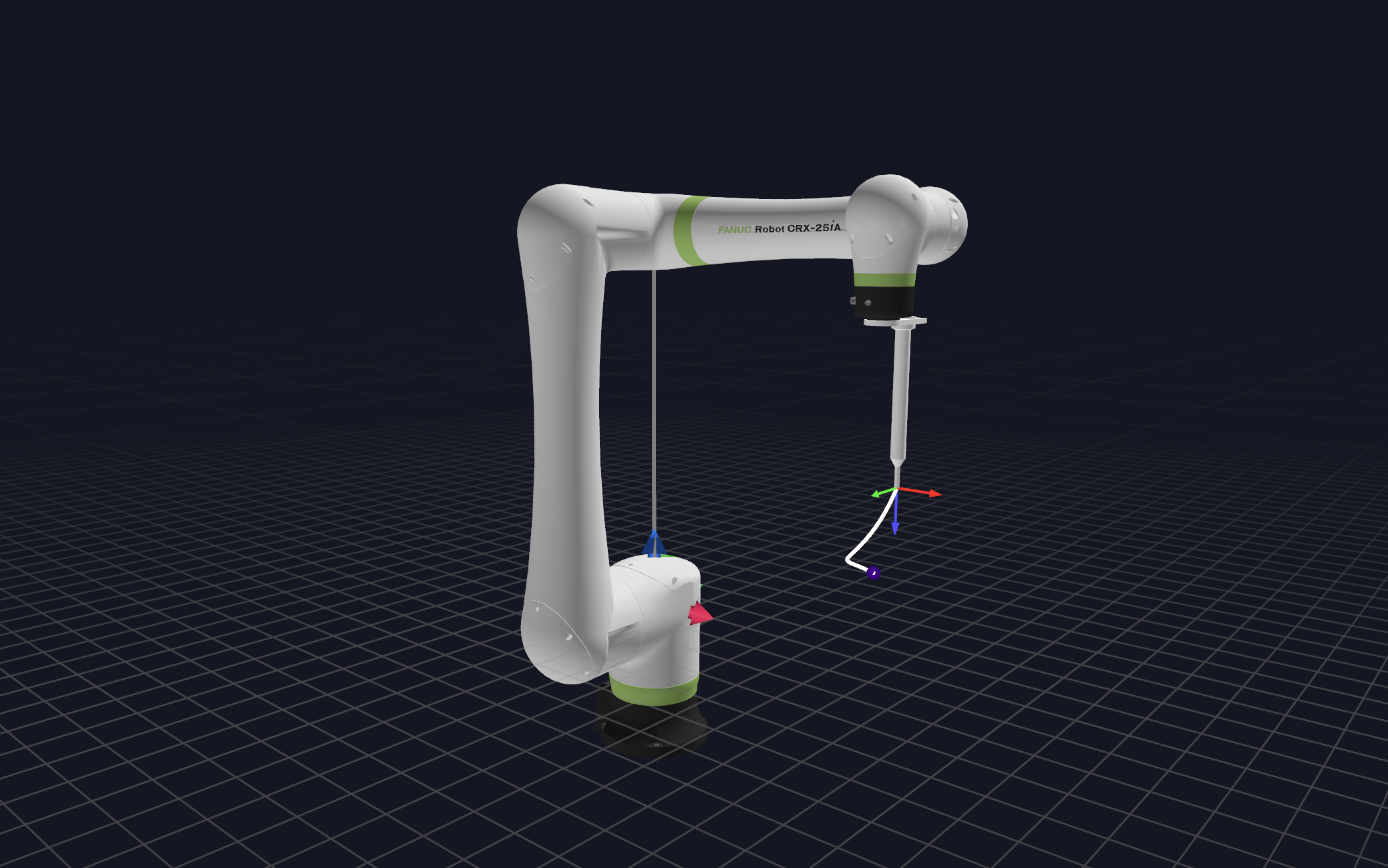
- Collision-Free Movement
from nova.actions import collision_free
from nova.types import Pose, MotionSettings
from math import pi
actions = [
collision_free(
target=Pose((-500, -400, 200, pi, 0, 0)),
collision_scene=collision_scene,
settings=MotionSettings(tcp_velocity_limit=30)
)
]
https://github.com/user-attachments/assets/0416151f-1304-46e2-a4ab-485fcda766fc
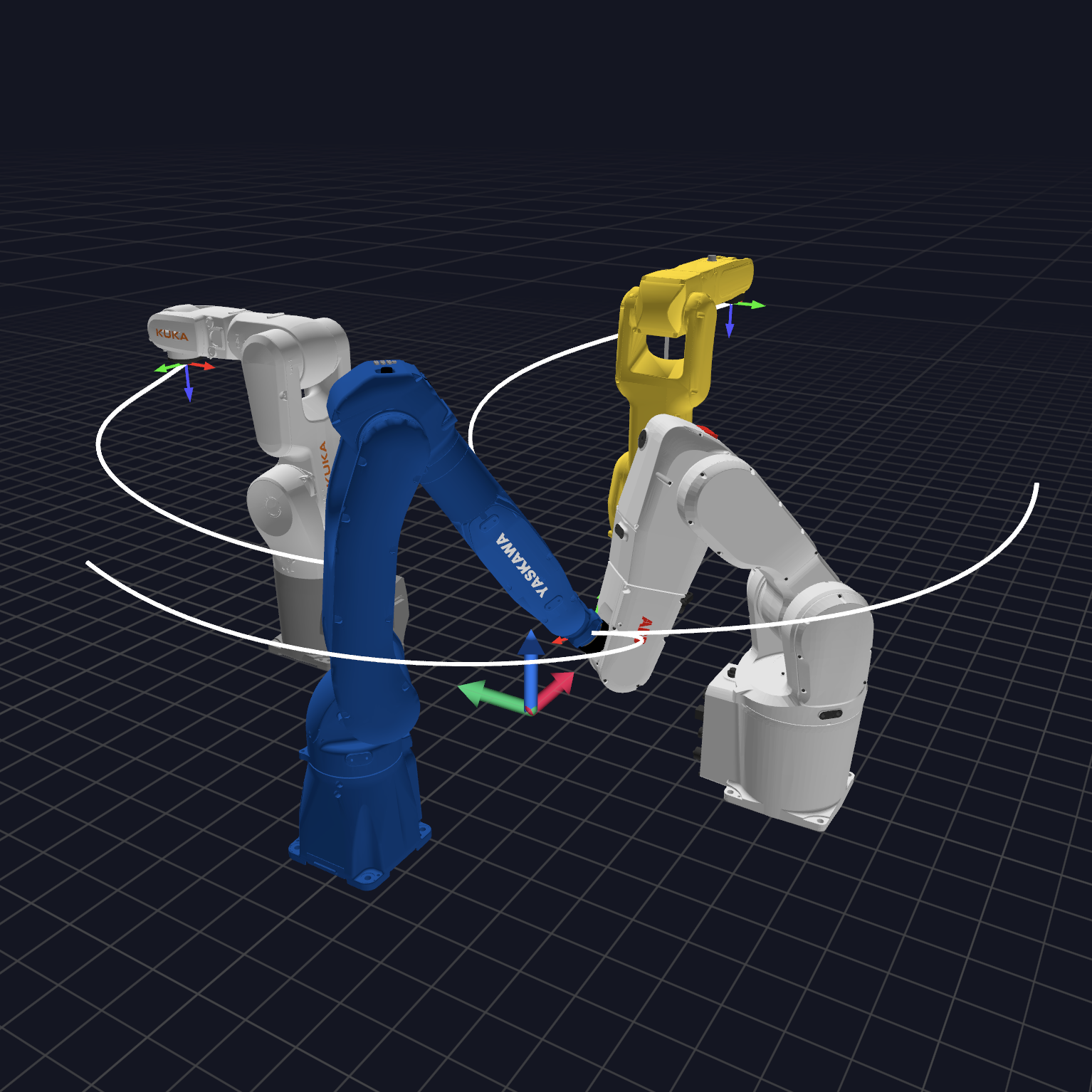
- Multiple Robot Coordination
import asyncio
async def move_robots():
async with ur10[0] as ur_mg, kuka[0] as kuka_mg:
await asyncio.gather(
move_robot(ur_mg, "Flange"),
move_robot(kuka_mg, "Flange")
)
See the move_multiple_robots example for more details.
Advanced Features
- I/O Control
from nova.actions import io_write, joint_ptp, cartesian_ptp
actions = [
joint_ptp(home_joints),
io_write(key="digital_out[0]", value=False), # Set digital output
cartesian_ptp(target_pose),
joint_ptp(home_joints)
]
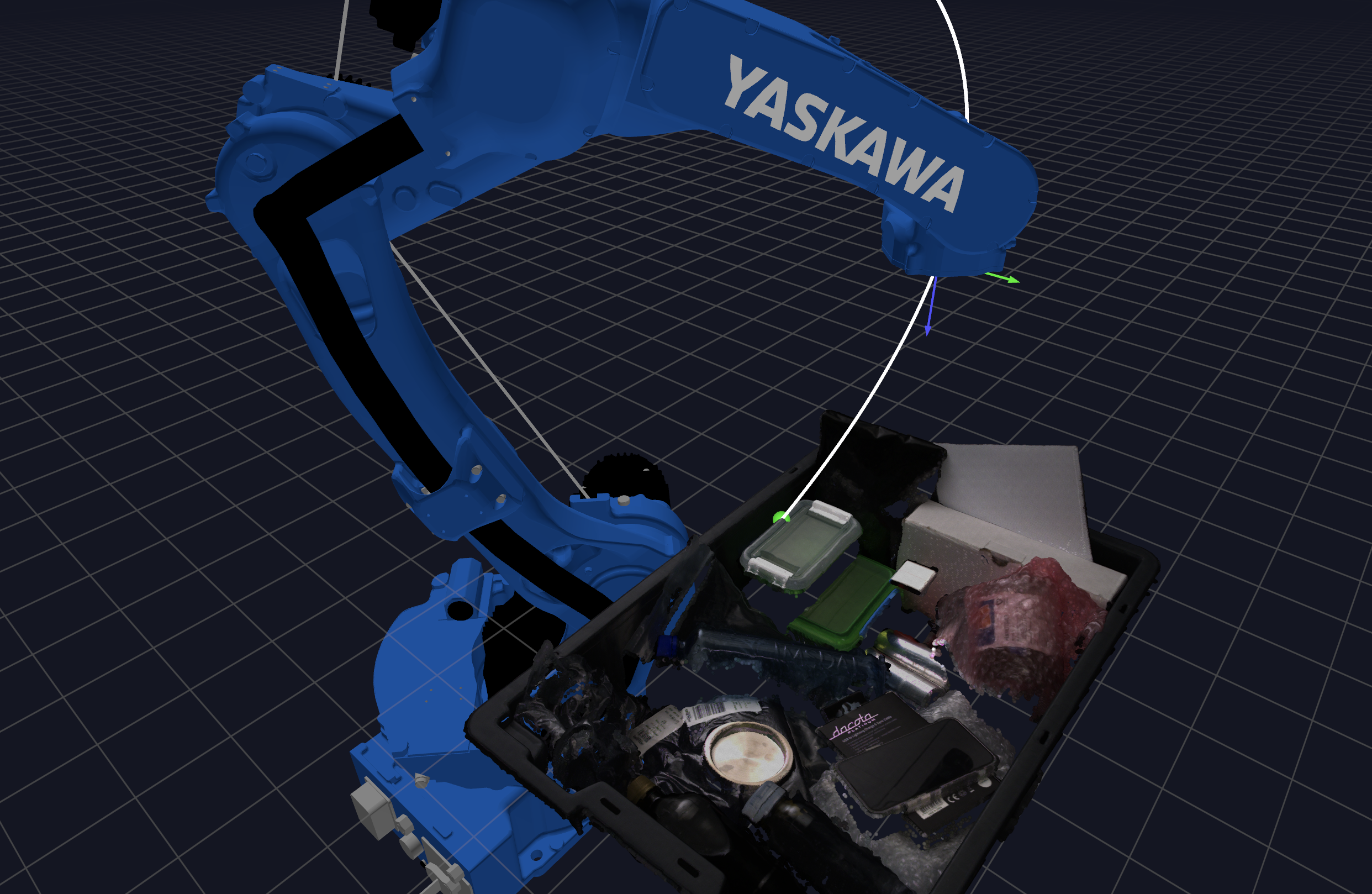
- 3D Visualization with Rerun
# Basic 3D visualization (default)
@nova.program(
viewer=nova.viewers.Rerun()
)
async def main():
async with Nova() as nova:
cell = nova.cell()
controller = await cell.controller("robot1")
async with controller[0] as motion_group:
actions = [cartesian_ptp(target_pose)]
trajectory = await motion_group.plan(actions, tcp)
# Trajectory is automatically visualized in Rerun
# Advanced visualization with detailed panels and tool models
@nova.program(
viewer=nova.viewers.Rerun(
show_details=True, # Show detailed analysis panels
show_safety_zones=True, # Show robot safety zones
show_collision_link_chain=True, # Show collision geometry
tcp_tools={
"vacuum": "assets/vacuum_cup.stl",
"gripper": "assets/parallel_gripper.stl"
}
)
)
Note: For visualization features, install the rerun extras:
uv add wandelbots-nova --extra nova-rerun-bridge
- Adding and Using Custom TCP (Tool Center Point)
import json
import nova
from nova import Nova
from nova.api import models
from nova.actions import cartesian_ptp
from nova.types import Pose
# Define TCP configuration
tcp_config = {
"id": "vacuum_gripper",
"readable_name": "Vacuum Gripper",
"position": {"x": 0, "y": 0, "z": 100}, # 100mm in Z direction
"rotation": {"angles": [0, 0, 0], "type": "EULER_ANGLES_EXTRINSIC_XYZ"}
}
@nova.program(
name="Add TCP",
preconditions=ProgramPreconditions(
controllers=[
virtual_controller(
name="robot1",
manufacturer=api.models.Manufacturer.UNIVERSALROBOTS,
type=api.models.VirtualControllerTypes.UNIVERSALROBOTS_MINUS_UR10E,
),
],
cleanup_controllers=False,
),
)
async def setup_tcp():
async with Nova() as nova:
cell = nova.cell()
controller = await cell.controller("robot1")
# Add TCP to virtual robot
tcp_config_obj = models.RobotTcp.from_json(json.dumps(tcp_config))
await nova._api_client.virtual_robot_setup_api.add_virtual_robot_tcp(
cell.cell_id,
controller.controller_id,
motion_group_idx=0,
tcp_config_obj
)
# Use the new TCP
async with controller[0] as motion_group:
current_pose = await motion_group.tcp_pose("vacuum_gripper")
# Plan motions using the new TCP
actions = [cartesian_ptp(current_pose @ Pose((100, 0, 0, 0, 0, 0)))]
trajectory = await motion_group.plan(actions, "vacuum_gripper")
- Using Common Coordinate Systems for Multiple Robots
from math import pi
import asyncio
import nova
from nova.api.models import CoordinateSystem, Vector3d, RotationAngles, RotationAngleTypes
from nova.actions import cartesian_ptp
from nova.types import Pose
@nova.program(
preconditions=ProgramPreconditions(
controllers=[
virtual_controller(
name="ur10",
manufacturer=api.models.Manufacturer.UNIVERSALROBOTS,
type=api.models.VirtualControllerTypes.UNIVERSALROBOTS_MINUS_UR10E,
),
virtual_controller(
name="kuka",
manufacturer=api.models.Manufacturer.KUKA,
type=api.models.VirtualControllerTypes.KUKA_MINUS_KR16_R1610_2,
),
],
cleanup_controllers=False,
),
)
async def setup_coordinated_robots():
async with Nova() as nova:
cell = nova.cell()
# Setup robots
robot1 = await cell.controller("ur10")
robot2 = await cell.controller("kuka")
# Define common world coordinate system
world_mounting = CoordinateSystem(
coordinate_system="world",
name="mounting",
reference_uid="",
position=Vector3d(x=0, y=0, z=0),
rotation=RotationAngles(
angles=[0, 0, 0],
type=RotationAngleTypes.EULER_ANGLES_EXTRINSIC_XYZ
)
)
# Position robots relative to world coordinates
await nova._api_client.virtual_robot_setup_api.set_virtual_robot_mounting(
cell="cell",
controller=robot1.controller_id,
id=0, # motion_group_id
coordinate_system=CoordinateSystem(
coordinate_system="world",
name="robot1_mount",
reference_uid="",
position=Vector3d(x=500, y=0, z=0), # Robot 1 at x=500mm
rotation=RotationAngles(
angles=[0, 0, 0],
type=RotationAngleTypes.EULER_ANGLES_EXTRINSIC_XYZ
)
)
)
await nova._api_client.virtual_robot_setup_api.set_virtual_robot_mounting(
cell="cell",
controller=robot2.controller_id,
id=0, # motion_group_id
coordinate_system=CoordinateSystem(
coordinate_system="world",
name="robot2_mount",
reference_uid="",
position=Vector3d(x=-500, y=0, z=0), # Robot 2 at x=-500mm
rotation=RotationAngles(
angles=[0, 0, pi], # Rotated 180° around Z
type=RotationAngleTypes.EULER_ANGLES_EXTRINSIC_XYZ
)
)
)
# Now both robots can work in the same coordinate system
async with robot1[0] as mg1, robot2[0] as mg2:
# Movements will be relative to world coordinates
await asyncio.gather(
mg1.plan([cartesian_ptp(Pose((0, 100, 0, 0, 0, 0)))], "tcp1"),
mg2.plan([cartesian_ptp(Pose((0, -100, 0, 0, 0, 0)))], "tcp2")
)
Development
To install the development dependencies, run the following command
uv sync --extra "nova-rerun-bridge"
Formatting
uv run ruff format
uv run ruff check --select I --fix
Yaml Linting
docker run --rm -it -v $(pwd):/data cytopia/yamllint -d .yamllint .
Using Branch Versions For Testing
When having feature branches or forks, or might be helpful to test the library as dependency in other projects first. The pyproject.toml allows to pull the library from different sources.
wandelbots-nova = { git = "https://github.com/wandelbotsgmbh/wandelbots-nova.git", branch = "fix/http-prefix" }
wandelbots-nova @ git+https://github.com/wandelbotsgmbh/wandelbots-nova.git@fix/http-prefix
Environment Variables for NOVA Configuration
- Copy the Template: Make a copy of the provided
.env.templatefile and rename it to.envwithcp .env.template .env. - Fill in the Values: Open the
.envfile in a text editor and provide the necessary values for each variable. The table below describes each variable and its usage.
| Variable | Description | Required | Default | Example |
|---|---|---|---|---|
NOVA_API |
The base URL or hostname of the NOVA server instance. | Yes | None | https://nova.example.com or http://172.0.0.1 |
NOVA_USERNAME |
The username credential used for authentication with the NOVA service. | Yes* | None | my_username |
NOVA_PASSWORD |
The password credential used in conjunction with NOVA_USERNAME. |
Yes* | None | my_password |
NOVA_ACCESS_TOKEN |
A pre-obtained access token for NOVA if using token-based authentication. | Yes* | None | eyJhbGciOi... |
Note on Authentication: You can authenticate with NOVA using either username/password credentials or a pre-obtained access token, depending on your setup and security model:
- If using username/password: Ensure both
NOVA_USERNAMEandNOVA_PASSWORDare set, and leaveNOVA_ACCESS_TOKENunset.- If using an access token: Ensure
NOVA_ACCESS_TOKENis set, and leaveNOVA_USERNAMEandNOVA_PASSWORDunset.Only one method should be used at a time. If both methods are set, the token-based authentication (
NOVA_ACCESS_TOKEN) will typically take precedence.
Release Process
Overview
| Variable | Description | Where | Example version |
|---|---|---|---|
main |
Stable releases (normal semver vX.Y.Z) | PyPI (pip install wandelbots-nova) |
v1.13.0 |
release/* |
The username credential used for authentication with the NOVA service. | PyPI | v1.8.7-release-1.x |
| any branch | Development builds (not published to PyPI) | GitHub Actions | e4c8af0647839... |
Stable releases (main)
Every merge to main triggers the Release package workflow: 1. Semantic-release inspects the commit messages, bumps the version, builds the wheel/sdist. 2. The package is uploaded to PyPI. 3. A GitHub Release is created/updated with the assets.
Long-term-support lines (release/*)
For customers stuck on an older major or for special LTS contracts:
- Open (or keep) a branch named
release/1.x,release/customer-foo, etc. - Every commit on that branch triggers the same workflow and publishes stable numbers, but the git tag and PyPI version carry the branch slug so lines never collide.
Create a dev build
If you only need a throw-away test build, go to the
Actions tab → "Nova SDK: Build dev wheel" → Run workflow (pick the branch).
When it finishes, open the Install instructions job for a ready-to-copy pip install "wandelbots-nova @ git+https://github.com/wandelbotsgmbh/wandelbots-nova.git@<commit>" line.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file wandelbots_nova-2.1.2.tar.gz.
File metadata
- Download URL: wandelbots_nova-2.1.2.tar.gz
- Upload date:
- Size: 16.7 MB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
f14a7b9d7821371576f3d107fde4d71f64ca18ec5d618b1ca38bd2111126ed0a
|
|
| MD5 |
5440237b57988dc36dd427f64ae78233
|
|
| BLAKE2b-256 |
47a3427e066eeac5dcda899b907211647afc2c9576c45e3c6f5938b3fae1b10c
|
File details
Details for the file wandelbots_nova-2.1.2-py3-none-any.whl.
File metadata
- Download URL: wandelbots_nova-2.1.2-py3-none-any.whl
- Upload date:
- Size: 16.9 MB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
6232a36572bc080c84dfbc4b3d335f657ea85bce9dd3d03ca8d3a0f77f93814b
|
|
| MD5 |
75fd53df1f67be9908559cf9e5a4249e
|
|
| BLAKE2b-256 |
7b4e68302b0d572a50ad72efbccee140b3f7506280d07050624021f8dd8af4df
|







