Python software for symbolic power system modeling and numerical analysis.

Project description
ANDES
Python Software for Symbolic Power System Modeling and Numerical Analysis.








Why ANDES
This software could be of interest to you if you are working on DAE modeling, simulation, and control for power systems. It has features that may be useful if you are applying deep (reinforcement) learning to such systems.
ANDES is by far easier to use for developing differential-algebraic equation (DAE) based models for power system dynamic simulation than other tools such as PSAT, Dome and PST, while maintaining high numerical efficiency.
ANDES comes with a rich set of commercial-grade dynamic models with all details implemented, including limiters, saturation, and zeroing out time constants.
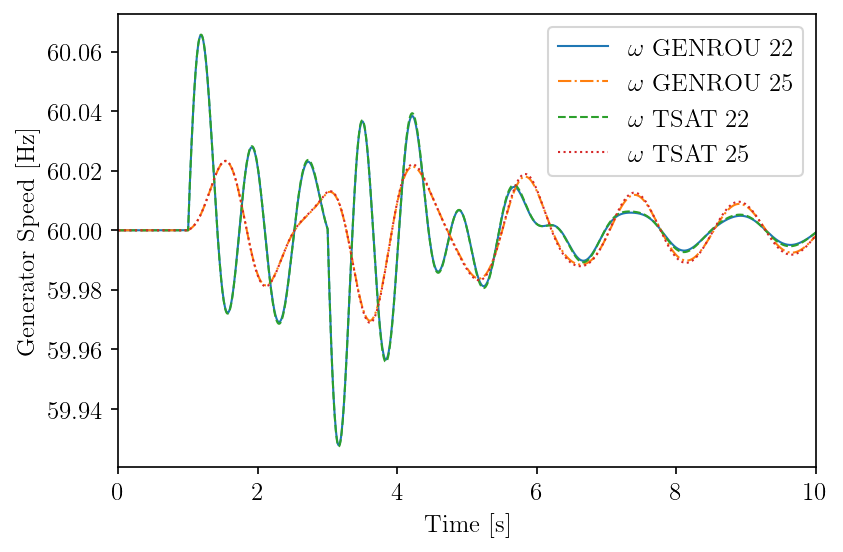
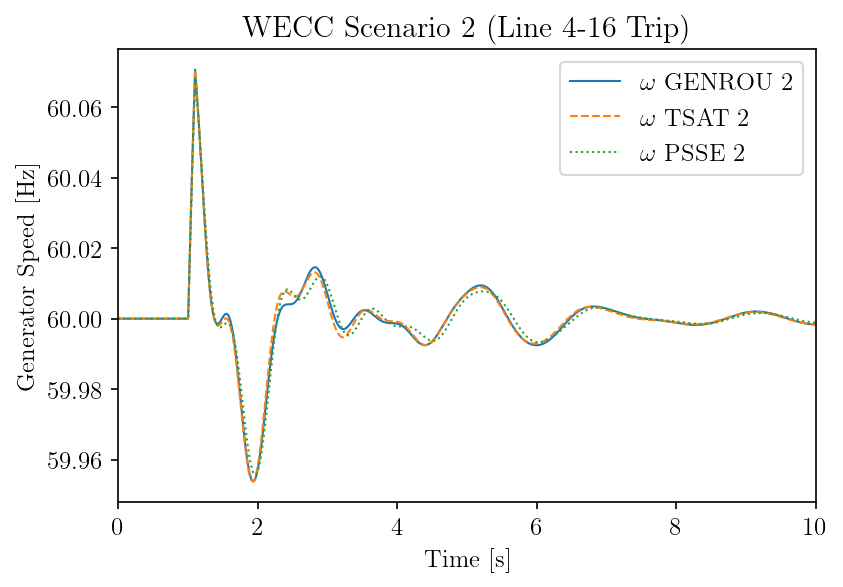
ANDES produces credible simulation results. The following table shows that
-
For the Northeast Power Coordinating Council (NPCC) 140-bus system (with GENROU, GENCLS, TGOV1 and IEEEX1), ANDES results match perfectly with that from TSAT.
-
For the Western Electricity Coordinating Council (WECC) 179-bus system (with GENROU, IEEEG1, EXST1, ESST3A, ESDC2A, IEEEST and ST2CUT), ANDES results match closely with those from TSAT and PSS/E. Note that TSAT and PSS/E results are not identical, either.
| NPCC Case Study | WECC Case Study |
|---|---|
 |
 |
ANDES provides a descriptive modeling framework in a scripting environment. Modeling DAE-based devices is as simple as describing the mathematical equations. Numerical code will be automatically generated for fast simulation.
| Controller Model and Equation | ANDES Code |
|---|---|
Diagram:  Write into DAEs:  |
 |
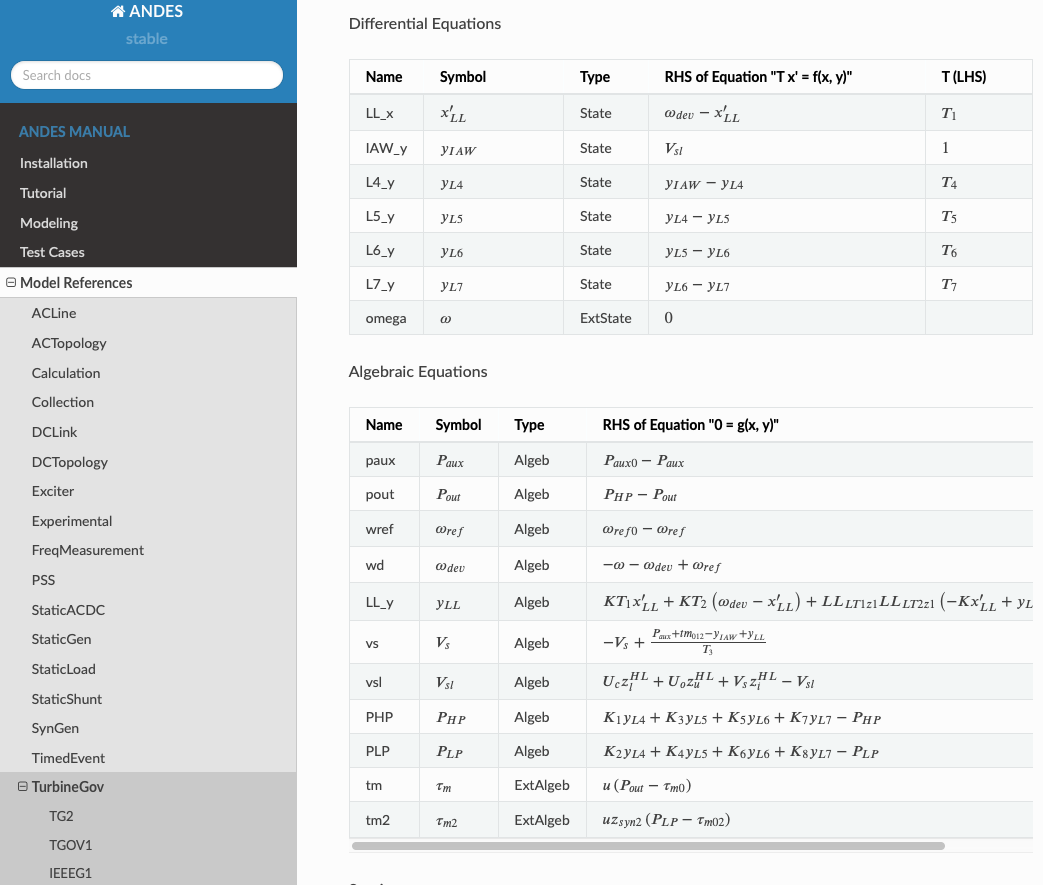
In ANDES, what you simulate is what you document. ANDES automatically generates model documentation, and the docs always stay up to date. The screenshot below is the generated documentation for the implemented IEEEG1 model.
In addition, ANDES features
- a rich library of transfer functions and discontinuous components (including limiters, deadbands, and saturation functions) available for prototyping models, which can be effortlessly instantiated as multiple devices for system analysis
- routines including Newton method for power flow calculation, implicit trapezoidal method for time-domain simulation, and full eigenvalue analysis
- developed with performance in mind. While written in Python, ANDES comes with a performance package and can finish a 20-second transient simulation of a 2000-bus system in a few seconds on a typical desktop computer
- out-of-the-box PSS/E raw and dyr data support for available models. Once a model is developed, inputs from a dyr file can be immediately supported
ANDES is currently under active development. Use the following resources to get involved.
- Check out examples in the examples folder
- Read the model verification results in the examples/verification folder
- Try in Jupyter Notebook on Binder
- Learn more about ANDES by reading the documentation
- Report bugs or issues by submitting a GitHub issue
- Submit contributions using pull requests
- Read release notes highlighted here
- Check out and and cite our paper
Table of Contents
- Get Started with ANDES
- Run Simulations
- Configure ANDES
- Format Converter
- Model Development
- API Reference
- Who is Using ANDES?
Get Started with ANDES
ANDES is a Python package and needs to be installed. We recommend Miniconda if you don't insist on an existing Python environment. Downloaded and install the latest 64-bit Miniconda3 for your platform from https://conda.io/miniconda.html.
Step 1: (Optional) Open the Anaconda Prompt (shell on Linux and macOS) and create a new environment.
Use the following command in the Anaconda Prompt:
conda create --name andes python=3.7
Step 2: Add the conda-forge channel and set it to default. Do
conda config --add channels conda-forge
conda config --set channel_priority flexible
Step 3: Activate the new environment
This step needs to be executed every time a new Anaconda Prompt or shell is open. At the prompt, do
conda activate andes
Step 4: Download and Install ANDES
-
Download the latest ANDES source code from https://github.com/cuihantao/andes/releases.
-
Extract the package to a folder where source code resides. Try to avoid spaces in any folder name.
-
Change directory to the ANDES root directory, which contains
setup.py. In the prompt, run the following commands in sequence.
conda install --file requirements.txt --yes
conda install --file requirements-dev.txt --yes
pip install -e .
Observe if any error is thrown. If not, ANDES is successfully installed in the development mode.
Step 5: Test ANDES
After the installation, run andes selftest and check if all tests pass.
Run Simulations
ANDES can be used as a command-line tool or a library. The following explains the command-line usage, which comes handy to run studies.
For a tutorial to use ANDES as a library, visit the interactive tutorial.
ANDES is invoked from the command line using the command andes.
Running andes without any input is equal to andes -h or andes --help,
which prints out a preamble and help commands:
_ _ | Version 0.8.3.post24+g8caf858a
/_\ _ _ __| |___ ___ | Python 3.7.1 on Darwin, 04/06/2020 08:47:43 PM
/ _ \| ' \/ _` / -_|_-< |
/_/ \_\_||_\__,_\___/__/ | This program comes with ABSOLUTELY NO WARRANTY.
usage: andes [-h] [-v {10,20,30,40,50}]
{run,plot,misc,prepare,doc,selftest} ...
positional arguments:
{run,plot,misc,prepare,doc,selftest}
[run] run simulation routine; [plot] plot simulation
results; [doc] quick documentation; [prepare] run the
symbolic-to-numeric preparation; [misc] miscellaneous
functions.
optional arguments:
-h, --help show this help message and exit
-v {10,20,30,40,50}, --verbose {10,20,30,40,50}
Program logging level in 10-DEBUG, 20-INFO,
30-WARNING, 40-ERROR or 50-CRITICAL.
The first level of commands are chosen from {run,plot,doc,misc,prepare,selftest}.
Each command contains a group of subcommands, which can be looked up by appending -h to the first-level command.
For example, use andes run -h to look up the subcommands in run.
andes has an option for the program verbosity level, controlled by -v or --verbose.
Accepted levels are the same as in the logging module:
10 - DEBUG, 20 - INFO, 30 - WARNING, 40 - ERROR, 50 - CRITICAL.
To show debugging outputs, use -v 10.
Step 1: Power Flow
Pass the path to the case file to andes run to perform power flow calculation.
It is recommended to change directory to the folder containing the test case before running.
The Kundur's two-area system can be located under andes/cases/kundur with the namekundur_full.xlsx.
Locate the folder in your system and use cd to change directory.
To run power flow calculation, do
andes run kundur_full.xlsx
Power flow reports will be saved to the directory where andes is called.
The power flow report, named kundur_full_out.txt, contains four sections:
- system statistics,
- ac bus and dc node data,
- ac line data,
- the initialized values of algebraic variables and state variables.
Step 2: Dynamic Analyses
ANDES comes with two dynamic analysis routines: time-domain simulation and eigenvalue analysis.
Option -r or -routine is used to specify the routine,
followed by the routine name.
Available routine names include pflow, tds, eig.
pflowis the default power flow calculation and can be omitted.tdsis for time domain simulation.eigis for for eigenvalue analysis.
To run time-domain simulation for kundur_full.xlsx in the current directory, do
andes run kundur_full.xlsx -r tds
Two output files, kundur_full_out.lst and kundur_full_out.npy will be created for variable names
and values, respectively.
Likewise, to run eigenvalue analysis for kundur_full.xlsx, use
andes run kundur_full.xlsx -r eig
The eigenvalue report will be written in a text file named kundur_full_eig.txt.
PSS/E raw and dyr support
ANDES supports the PSS/E v32 raw and dyr files for power flow and dynamic studies.
Example raw and dyr files can be found in andes/cases/kundur.
To perform a time-domain simulation for kundur.raw and kundur_full.dyr, run
andes run kundur.raw --addfile kundur_full.dyr -r tds
where --addfile takes the dyr file.
Please note that the support for dyr file is limited to the models available in ANDES.
Alternatively, one can convert the PSS/E data to an ANDES xlsx file with
andes run kundur.raw --addfile kundur_full.dyr --convert
Edits such as adding models can be made to the xlsx file before simulation.
Step 3: Plot Results
andes plot is the command-line tool for plotting.
Currently, it only supports time-domain simulation data.
Three arguments are needed: file name, x-axis variable index, and y-axis variable index (or indices).
Variable indices can be looked up by opening the kundur_full_out.lst file as plain text.
Index 0 is always the simulation time.
Multiple y-axis variable indices can be provided in eithers space-separated format or the Pythonic comma-separated style.
To plot speed (omega) for all generators with indices 2, 8, 14, 20, either do
andes plot kundur_full_out.npy 0 2 8 14 20
or
andes plot kundur_full_out.npy 0 2:21:6
Configure ANDES
ANDES uses a config file to set runtime configs for system, routines and models. The config file is loaded at the time when ANDES is invoked or imported.
At the command-line prompt,
andes misc --savesaves all configs to a file. By default, it goes to~/.andes/andes.conf.andes misc --editis a shortcut for editing the config file. It takes an optional editor name.
Without an editor name, the following default editor is used:
- On Microsoft Windows, it will open up a notepad.
- On Linux, it will use the
$EDITORenvironment variable or usevimby default. - On macOS, the default is vim.
Format Converter
Input Converter
ANDES recognizes a few input formats (MATPOWER, PSS/E and ANDES xlsx) and can convert input to the xlsx format.
This function is useful when one wants to use models that are unique in ANDES.
andes run CASENAME.ext --convertperforms the conversion toxlsx, whereCASENAME.extis the full test case name.andes run CASENAME.ext --convert-allperforms the conversion and create empty sheets for all supported models.andes run CASENAME.xlsx --add-book ADD_BOOK, whereADD_BOOKis the workbook name (the sane as the model name) to be added.
For example, to convert wscc9.raw in the current folder to the ANDES xlsx format, run
andes run wscc9.raw --convert
The command will write the output to wscc9.xlsx in the current directory.
An additional dyr file can be included through --addfile, as shown in
Step 2: Dynamic Analysis.
Power flow models and dynamic models will be consolidated and written to a single xlsx file.
Adding Model Template to an Existing xlsx File
To add new models to an existing xlsx file, one needs to create new workbooks (shown tabs at the bottom),
--add-book can add model templates to an existing xlsx file.
To add models GENROU and TGOV1 to the xlsx file wscc9.xlsx, run
andes run wscc9.xlsx --add-book GENROU,TGOV1
Two workbooks named "GENROU" and "TGOV1" will appear in the new wscc9.xlsx file.
Warning: --add-book will overwrite the original file.
All empty workbooks will be discarded.
It is recommended to make copies to backup your cases.
Output Converter
The output converter is used to convert .npy output to a comma-separated (csv) file.
To convert, do andes plot OUTPUTNAME.npy -c , where OUTPUTNAME.npy is the file name of the simulation output.
For example, to convert kundur_full_out.npy (in the current directory) to a csv file, run
andes plot kundur_full_out.npy -c
The output will be written to kundur_full_out.csv in the current directory.
Model Development
The steps to develop new models are outlined.
New models will need to be written in Python and incorporated in the ANDES source code.
Models are placed under andes/models with a descriptive file name for the model type.
If a new file is created, import the building block classes at the top of the file
from andes.core.model import ModelData, Model
from andes.core.param import IdxParam, NumParam, ExtParam
from andes.core.var import Algeb, State, ExtAlgeb, ExtState
from andes.core.service import ConstService, ExtService
from andes.core.discrete import AntiWindup
The TGOV1 model will be used to illustrate the model development process.
Step 1: Define Parameters
Create a class to hold parameters that will be loaded from the data file.
The class inherits from ModelData
class TGOV1Data(ModelData):
def __init__(self):
self.syn = IdxParam(model='SynGen',
info='Synchronous generator idx',
mandatory=True,
)
self.R = NumParam(info='Speed regulation gain under machine base',
tex_name='R',
default=0.05,
unit='p.u.',
ipower=True,
)
self.wref0 = NumParam(info='Base speed reference',
tex_name=r'\omega_{ref0}',
default=1.0,
unit='p.u.',
)
self.VMAX = NumParam(info='Maximum valve position',
tex_name='V_{max}',
unit='p.u.',
default=1.2,
power=True,
)
self.VMIN = NumParam(info='Minimum valve position',
tex_name='V_{min}',
unit='p.u.',
default=0.0,
power=True,
)
self.T1 = NumParam(info='Valve time constant',
default=0.1,
tex_name='T_1')
self.T2 = NumParam(info='Lead-lag lead time constant',
default=0.2,
tex_name='T_2')
self.T3 = NumParam(info='Lead-lag lag time constant',
default=10.0,
tex_name='T_3')
self.Dt = NumParam(info='Turbine damping coefficient',
default=0.0,
tex_name='D_t',
power=True,
)
Note that the example above has all the parameters loaded in one class.
In practice, it is recommended to create a base class for common parameters and let TGOV2Data inherit from it.
See the code in andes/models/governor.py for the example.
Step 2: Define Externals
Next, another class to hold the non-parameter instances is created.
The class inherits from Model and takes three positional arguments by the constructor.
The code below defines parameters, variables and services retrieved from external models (specifically , generators).
class TGOV1Model(Model):
def __init__(self, system, config):
self.Sn = ExtParam(src='Sn',
model='SynGen',
indexer=self.syn,
tex_name='S_m',
info='Rated power from generator',
unit='MVA',
export=False,
)
self.Vn = ExtParam(src='Vn',
model='SynGen',
indexer=self.syn,
tex_name='V_m',
info='Rated voltage from generator',
unit='kV',
export=False,
)
self.tm0 = ExtService(src='tm',
model='SynGen',
indexer=self.syn,
tex_name=r'\tau_{m0}',
info='Initial mechanical input')
self.omega = ExtState(src='omega',
model='SynGen',
indexer=self.syn,
tex_name=r'\omega',
info='Generator speed',
unit='p.u.'
)
In addition, a service can be defined for the inverse of the gain
self.gain = ConstService(v_str='u / R',
tex_name='G',
)
Step 3: Define Variables
First of all, the turbine governor output modifies the generator power input. Therefore, the generator input variable should be retrieved by the governor. Next, internal variables can be defined.
# mechanical torque input of generators
self.tm = ExtAlgeb(src='tm',
model='SynGen',
indexer=self.syn,
tex_name=r'\tau_m',
info='Mechanical power to generator',
)
self.pout = Algeb(info='Turbine final output power',
tex_name='P_{out}',
)
self.wref = Algeb(info='Speed reference variable',
tex_name=r'\omega_{ref}',
)
self.pref = Algeb(info='Reference power input',
tex_name='P_{ref}',
)
self.wd = Algeb(info='Generator under speed',
unit='p.u.',
tex_name=r'\omega_{dev}',
)
self.pd = Algeb(info='Pref plus under speed times gain',
unit='p.u.',
tex_name="P_d",
)
self.LAG_y = State(info='State in lag transfer function',
tex_name=r"y_{LAG}",
)
self.LAG_lim = AntiWindup(u=self.LAG_y,
lower=self.VMIN,
upper=self.VMAX,
tex_name='lim_{lag}',
)
self.LL_x = State(info='State in lead-lag transfer function',
tex_name="x'_{LL}",
)
self.LL_y = Algeb(info='Lead-lag Output',
tex_name='y_{LL}',
)
Step 4: Define Equations
Set up the equation associated with each variable.
Algebraic equations are in the form of 0 = g(x, y).
Differential equations are in the form of T \dot{x} = f(x, y).
self.tm.e_str = 'u*(pout - tm0)'
self.wref.e_str = 'wref0 - wref'
self.pref.e_str = 'tm0 * R - pref'
self.wd.e_str = '(wref - omega) - wd'
self.pd.e_str='(wd + pref) * gain - pd'
self.LAG_x.e_str = 'LAG_lim_zi * (1 * pd - LAG_y) / T1'
self.LL_x.e_str = '(LAG_y - LL_x) / T3'
self.LL_y.e_str='T2 / T3 * (LAG_y - LL_x) + LL_x - LL_y'
self.pout.e_str = '(LL_y + Dt * wd) - pout'
Step 5: Define Initializers
Initializers are used to set up initial values for variables.
Initializers are evaluated in the same sequence as the declaration of variables.
Initializer evaluation results are set to the corresponding variable.
Usually, only internal variables (Algeb and State) require initializers.
self.wref.v_str = 'wref0'
self.pout.v_str = 'tm0'
self.LL_y.v_str = 'LAG_x'
self.LL_x.v_str = 'LAG_x'
self.LAG_x.v_str = 'pd'
self.pd.v_str = 'tm0'
self.wd.v_str = '0'
self.pref.v_str = 'tm0 * R'
Alternatively, equations and initializers can be passed to keyword arguments e_str and v_str, respectively
, of the corresponding instance.
Step 6: Finalize
This step provides additional information on the model. The group to which the device belongs need to be specified, and the routine this model supports need to updated.
For example, TGOV1 belongs to the TurbineGov group, which is defined in andes/models/group.py.
TGOV1 participates in the time-domain simulation and is not involved in power flow.
The snipet below is added to the constructor of class TGOV1Model.
self.group = 'TurbineGov'
self.flags.update({'tds': True})
Next, a TGOV1 class need to be created as the final class. It is a bit boilerplate as of the current
implementation.
class TGOV1(TGOV1Data, TGOV1Model):
def __init__(self, system, config):
TGOV1Data.__init__(self)
TGOV1Model.__init__(self, system, config)
One more step, the class needs to be added to the package __init__.py file to be loaded.
Edit andes/models/__init__.py and add to non_jit whose keys are the file names and values are the classes in
the file.
To add TGOV1, locate the line with key governor and add TGOV1 to the value list so that it looks like
non_jit = OrderedDict([
# ...
('governor', ['TG2', 'TGOV1']),
# ...
])
Finally, run andes prepare from the command-line to re-generate code for the new model.
API Reference
The official documentation explains the complete list of modeling components. The most commonly used ones are highlighted in the following.
Who is Using ANDES?
Please let us know if you are using ANDES for research or projects. We kindly request you to cite our paper if you find ANDES useful.




Sponsors and Contributors
This work was supported in part by the Engineering Research Center Program of the National Science Foundation and the Department of Energy under NSF Award Number EEC-1041877 and the CURENT Industry Partnership Program.
See GitHub contributors for the contributor list.
License
ANDES is licensed under the GPL v3 License.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
File details
Details for the file andes-1.0.8.tar.gz.
File metadata
- Download URL: andes-1.0.8.tar.gz
- Upload date:
- Size: 7.0 MB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/2.0.0 pkginfo/1.5.0.1 requests/2.24.0 setuptools/49.2.0.post20200714 requests-toolbelt/0.9.1 tqdm/4.47.0 CPython/3.7.7
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
55d285346191e326e3f06c9dabdd586e154fdaa91ea82dea2852a893bcd3ef3d
|
|
| MD5 |
ff278e888e96d367b4a59f84c4d1bad8
|
|
| BLAKE2b-256 |
45264a1d2a7bc1c2fbdb91ba01eb4e0c8489c8eadbbac13f86178ecbd560cd4e
|







