Excitation of exciting systems through differentiable model predictive excitation

Project description
Differentiable Model Predictive Excitation (DMPE):
This repository implements an algorithm for the excitation of systems with unknown (usually non-linear) dynamics. The inner workings and lines of thought are outlined within the corresponding publication. If you found this repository useful for your research, please cite the current preprint version as:
@Article{Vater2024,
author = {Vater, Hendrik and Wallscheid, Oliver},
title = {Differentiable Model Predictive Excitation: Generating Optimal Data Sets for Learning of Dynamical System Models},
journal = {TechRxiv preprint},
year = {2024},
doi = {10.36227/techrxiv.172840381.16440835/v1},
}
Installation:
If you are specifically interested in reproducing the results from the
Vater2024publication, you are kindly referred to: https://pypi.org/project/dmpe/0.1.3/
Else, if you are specifically interested in reproducing the results from the
TBDrelated publication, you are kindly referred to: https://pypi.org/project/dmpe/0.2.1/
Otherwise, the simplest way is using Python >= 3.11:
pip install dmpe
- Intended for a Linux system using an NVIDIA GPU where CUDA is set up
- Theoretically, it can be used without a GPU and also on Windows, but performance will likely be suboptimal and the results are not exactly reproducible with the GPU/Linux results.
- Depends on
exciting_environments - As of now, the requirements/dependencies are strict. It is likely that other versions work as well, but the given setup has been used extensively. (The requirements will likely be extended in the future.)
- As this repository is actively being worked on, it is possible that a more recent version is accessible in the
DMPEGitHub repository.
Alternative installation:
Download the current state of the exciting_environments repository, e.g.:
git clone git@github.com:ExcitingSystems/exciting-environments.git
and install it in your python environment by moving to the downloaded folder and running pip install ..
Then, download the DMPE source code, e.g.:
git clone git@github.com:ExcitingSystems/DMPE.git
Afterwards, install it from within the repository folder via pip install -e . for an editable version or with pip install . if you do not plan to make changes to the code.
Structure:
The repository is structured as follows:
data/is used to store the experiment results (can be created manually or via a script located atevaluation/scripts/create_exp_directories.py)dmpe/contains the source code for the DMPE algorithm, for the GOATS algorithms from the related work, and the scripts to run experiments.examples/contains some examples to get started that are regularly updated to reflect the momentary state of the repo.fig/contains example images (e.g., for the README)notebooks/evalcontains jupyter notebooks that are intended for evaluation of experiments (generally not maintained and only updated when needed).notebooks/dev/contains jupyter notebooks that are intended for development on the repository (generally not maintained and only updated when needed).
Basic Usage:
To apply the algorithms onto a system, the systems structure must comply to a specific API (Naturally, this can be adapted in the future. Please open an issue or write an e-mail to vater@lea.uni-paderborn.de, if you are interested in discussing this). Example environments following this API can be found in the exciting_environments repository.
Using the algorithm for such an environment is as simple as:
import jax.numpy as jnp
import diffrax
import exciting_environments as excenvs
from dmpe.models.models import NeuralEulerODEPendulum
from dmpe.algorithms.algorithms import excite_with_dmpe
from dmpe.algorithms.algorithm_utils import default_dmpe_parameterization
env = excenvs.make(
env_id="Pendulum-v0",
batch_size=1,
action_normalizations = {"torque": excenvs.utils.MinMaxNormalization(min=-5, max=5)},
static_params={"g": 9.81, "l": 1, "m": 1},
solver=diffrax.Tsit5(),
tau=2e-2,
)
def featurize_theta(obs):
"""Transform angle information with sin() and cos()."""
feat_obs = jnp.stack([jnp.sin(obs[..., 0] * jnp.pi), jnp.cos(obs[..., 0] * jnp.pi), obs[..., 1]], axis=-1)
return feat_obs
# get default parameterization
exp_params, proposed_actions, loader_key, expl_key = default_dmpe_parameterization(
env, seed=0, featurize=featurize_theta, model_class=NeuralEulerODEPendulum
)
exp_params["n_time_steps"] = 1500 # reduce number of timesteps to N=1500
# run excitation
observations, actions, model, density_estimate, losses, proposed_actions, _ = excite_with_dmpe(
env,
exp_params,
proposed_actions,
loader_key,
expl_key,
)
# visualize
from dmpe.evaluation.plotting_utils import plot_sequence
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.rcParams['text.usetex'] = True
mpl.rcParams.update({'font.size': 10})
mpl.rcParams['text.latex.preamble']=r"\usepackage{bm}\usepackage{amsmath}"
fig = plot_sequence(observations, actions, env.tau, env.obs_description, env.action_description)
plt.show()
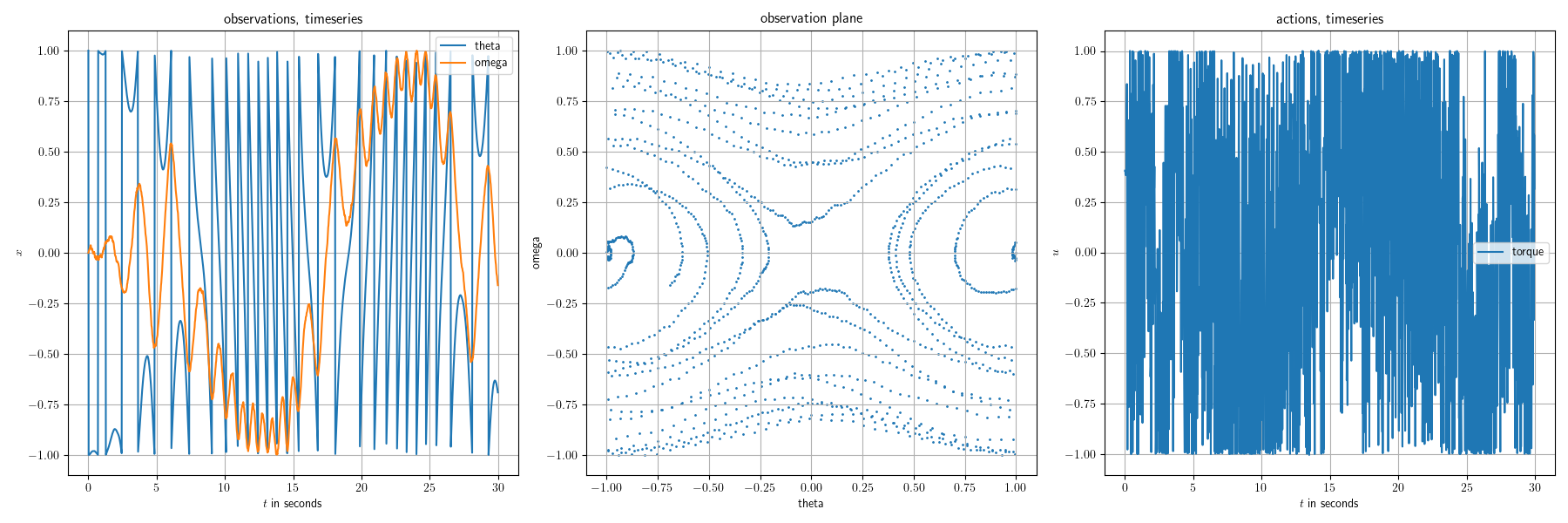
Further Examples:
Additional examples can be found in the examples/ folder.
There, the CartPole and PMSM are excited using DMPE.
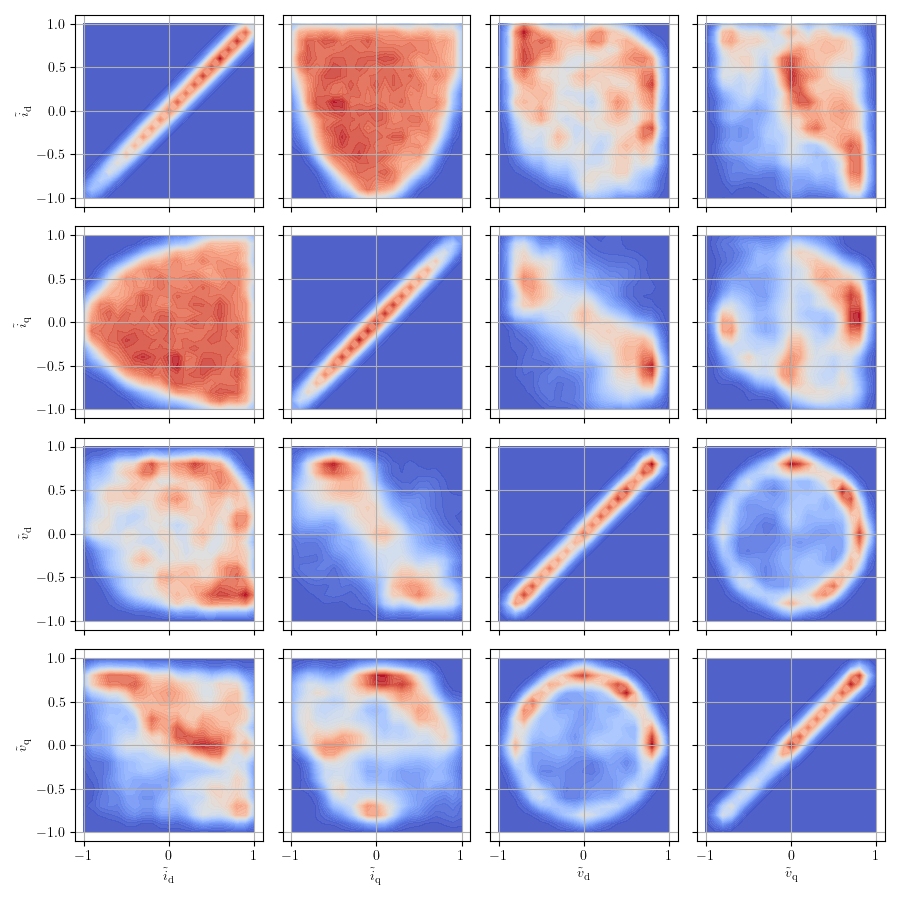
Exemplary PMSM results at $n = 5000 , \mathrm{min}^{-1}$:
- Exemplary acquired trajectory (without considering the action distribution):
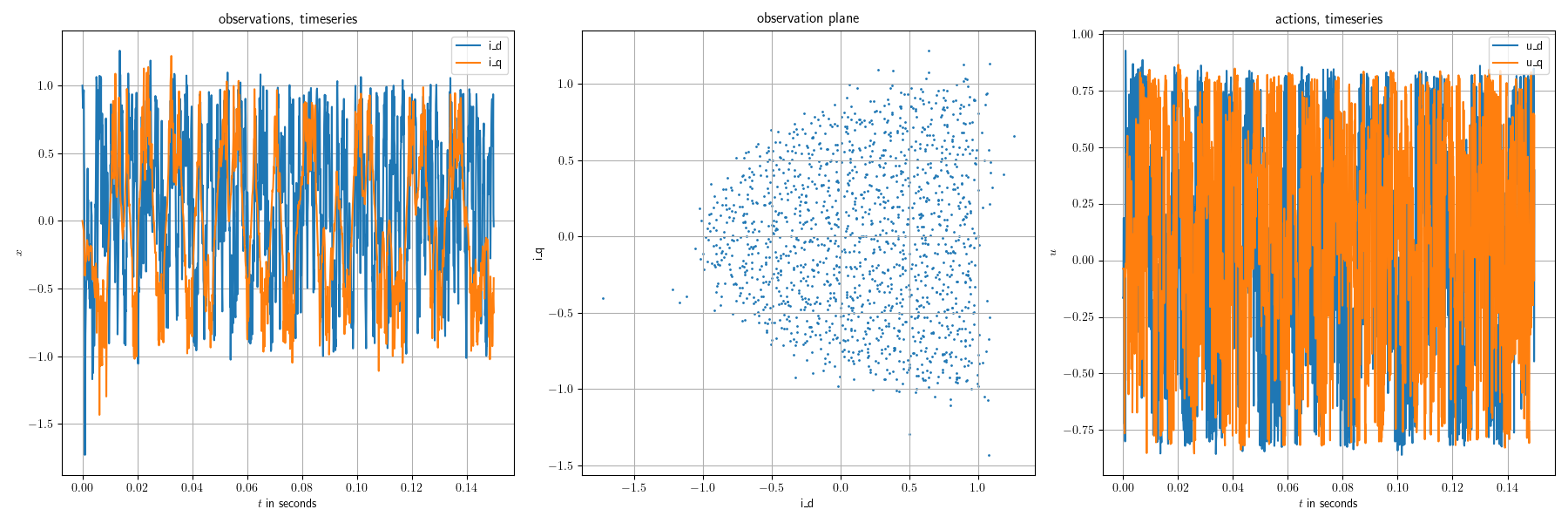
- feature-space coverage of the resulting data (without considering the action distribution):


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file dmpe-0.2.3.tar.gz.
File metadata
- Download URL: dmpe-0.2.3.tar.gz
- Upload date:
- Size: 68.6 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.1.0 CPython/3.11.11
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
40b3a58320faf28060007860e8c1daf965b49ef360295157f26d4c9cb210ba98
|
|
| MD5 |
0cd432ac30d64830756c6e363c283c57
|
|
| BLAKE2b-256 |
89d69e09ff28be43f7f6f103682a032f092654a42980ec729642c21733bf7908
|
File details
Details for the file dmpe-0.2.3-py3-none-any.whl.
File metadata
- Download URL: dmpe-0.2.3-py3-none-any.whl
- Upload date:
- Size: 89.4 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.1.0 CPython/3.11.11
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
a5eda7282c9364d7b8b5556f799adacafd007f8f4f63b5aca5e713da128957c3
|
|
| MD5 |
44753ac0c602e545750f680cda7235fc
|
|
| BLAKE2b-256 |
98528722e80e68c3b48f6bc9147d5f4f6c69ffa818724ab18b8a1ea8bff9fa1a
|







