Package related to the paper https://doi.org/10.1109/ICRA48891.2023.10160795.
Project description
ICRA2023 Autonomous Orbital Manipulation using Vector-Field Inequalities Example
Orbital manipulation code and minimal example for our ICRA2023 paper:
@InProceedings{koyama2023vitreoretinal,
author = {Koyama, Y. and Marinho, M. M. and Harada, K.},
title = {Vitreoretinal Surgical Robotic System with Autonomous Orbital Manipulation using Vector-Field Inequalities},
booktitle = {2023 IEEE International Conference on Robotics and Automation (ICRA)},
year = {2023},
month = may,
organization = {IEEE},
pages = {1--7},
}
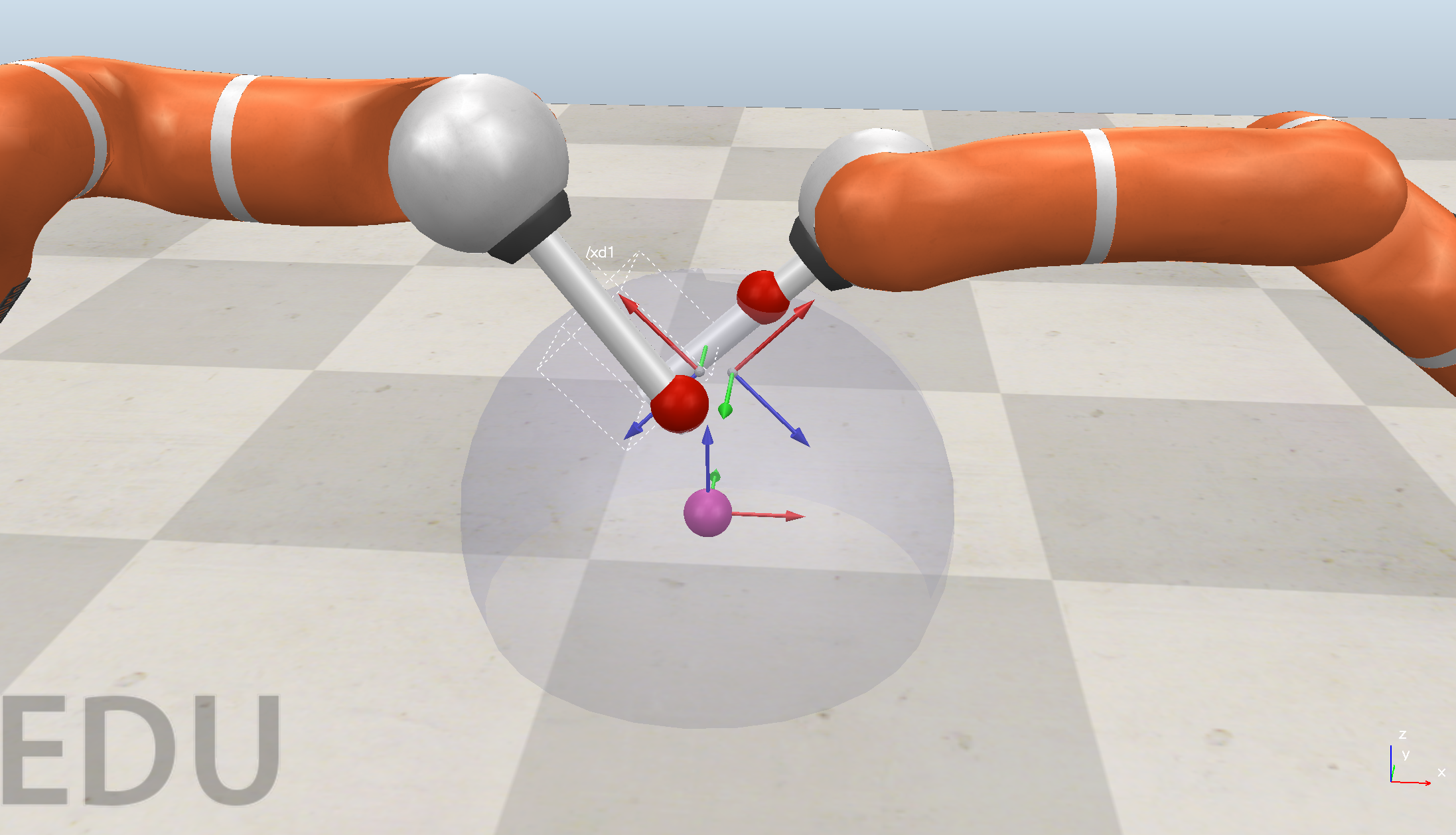
In this example, I have implemented the main code of the paper in orbital_manipulation.py.
By moving xd1 and xd2, the user can see the optimization handling the orbital manipulation constraint in real time.
To make this example simpler to users outside my lab, I have decided to use the KUKA LBR4+ robots available by default in CoppeliaSim.
The "eye" is in this simulation is much bigger than in the real experiments for easier visualization and operation on CoppeliaSim.
Configuration
Supposing you have a suitable Python3 installation, do as follows.
- Download this repository
git clone https://github.com/mmmarinho/icra2023_orbitalmanipulation.git
cd icra2023_orbitalmanipulation
- Create a virtual environment
python3 -m venv venv
source venv/bin/activate
- These instructions are for
bash-enabled systems, for other terminal programs, check the venv documentation linked below. - Remember to always activate this virtual env again when you want to reuse it.
- For more info on how to use venv [click here].
- Install the prerequisites
python3 -m pip install -r requirements.txt
Running this code
-
Open the
orbital_manipulation.tttscene in CoppeliaSim -
Run the
main.pyscript. Example
python3 main.py
- If at this stage you have problems connecting to CoppeliaSim, check the DQRobotics CoppeliaSim Interface webpage for possible fixes and tips.
-
The simulation will start automatically. You can click and drag the
xd1andxd2to change each robot's setpoint. Then, the robots will move accordingly to keep the orbital manipulation constraint. -
You can stop the script with
CTRL+C.
TODO
- Add the motion of the eye in the simulation. The real eye will naturally move in reaction to the motion enacted by the moving RCM points of each instrument.
Project details
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file marinholab_papers_icra2023_orbitalmanipulation-0.0.1.tar.gz.
File metadata
- Download URL: marinholab_papers_icra2023_orbitalmanipulation-0.0.1.tar.gz
- Upload date:
- Size: 8.5 kB
- Tags: Source
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
5b1abf1b7800a3d738b159690a8a52be6c06c6b281bbe17c0031b5094d594126
|
|
| MD5 |
1077ef54b0424b879a03e7a311b33c82
|
|
| BLAKE2b-256 |
47f2c8eafd0e80a1efa883ca0e144d248aac65fac671db523b6e602e69e7bd92
|
Provenance
The following attestation bundles were made for marinholab_papers_icra2023_orbitalmanipulation-0.0.1.tar.gz:
Publisher:
python-publish.yml on mmmarinho/icra2023_orbitalmanipulation
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
marinholab_papers_icra2023_orbitalmanipulation-0.0.1.tar.gz -
Subject digest:
5b1abf1b7800a3d738b159690a8a52be6c06c6b281bbe17c0031b5094d594126 - Sigstore transparency entry: 207319626
- Sigstore integration time:
-
Permalink:
mmmarinho/icra2023_orbitalmanipulation@09e48ce7391358f15347ae187fbee4423ed45db0 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/mmmarinho
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
python-publish.yml@09e48ce7391358f15347ae187fbee4423ed45db0 -
Trigger Event:
push
-
Statement type:
File details
Details for the file marinholab_papers_icra2023_orbitalmanipulation-0.0.1-py3-none-any.whl.
File metadata
- Download URL: marinholab_papers_icra2023_orbitalmanipulation-0.0.1-py3-none-any.whl
- Upload date:
- Size: 10.4 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
97fcacca0f224fb20e1c41b6b3b3c91cceaeb79e8a29e18fc7801c57a84ca76b
|
|
| MD5 |
0155aba0cd3654089bca3d0318759dce
|
|
| BLAKE2b-256 |
a188faf74ee79be02d762c81e8ee49ff67b9ab1cf13b1e878e773e3d2c5fc990
|
Provenance
The following attestation bundles were made for marinholab_papers_icra2023_orbitalmanipulation-0.0.1-py3-none-any.whl:
Publisher:
python-publish.yml on mmmarinho/icra2023_orbitalmanipulation
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
marinholab_papers_icra2023_orbitalmanipulation-0.0.1-py3-none-any.whl -
Subject digest:
97fcacca0f224fb20e1c41b6b3b3c91cceaeb79e8a29e18fc7801c57a84ca76b - Sigstore transparency entry: 207319630
- Sigstore integration time:
-
Permalink:
mmmarinho/icra2023_orbitalmanipulation@09e48ce7391358f15347ae187fbee4423ed45db0 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/mmmarinho
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
python-publish.yml@09e48ce7391358f15347ae187fbee4423ed45db0 -
Trigger Event:
push
-
Statement type:







