Lightweight scene editor for mujoco
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers

Project description




Scene Editor for MuJoCo
Lightweight, interactive scene editor for MuJoCo 3.x. Create or edit scenes in your browser to place shapes, import meshes, add robots, and edit elements interactively.
Quickstart
pip install mujoco-scene-editor
# Start a fresh, empty scene
mjcreate
# Load from MJCF XML or a blueprint JSON
mjedit path/to/scene.xml
Installation
Install the package on PyPi with
pip install mujoco-scene-editor
This installs necessary dependencies and exposes console scripts.
The following entry points are available and they are also accessible as scene-editor subcommands:
mjcreate: Create an empty scene (opens the web browser)mjedit: Edit an existing scene (opens the web browser)mjprompt: Generate a scene from a prompt and save it as a MuJoCo XML
From a local checkout:
pip install -e .
# or with dev tools
pip install -e '.[dev]'
To run with uv, use
# Run the installed console script via uv
uv run scene-editor --help
uv run scene-editor new
When the server starts, it prints the URL and opens your browser. Quit with Ctrl+C or the "Quit server" button.
Examples
Use the provided chemistry lab MJCF as a starting point:
# With pip-installed package
mjedit examples/prompt/scene_chemistry_lab.xml
# With uv (no install)
uv run mjedit examples/prompt/scene_chemistry_lab.xml
Then:
- Use "Add Box/Sphere/Cylinder" to place primitive geoms.
- Use "Add Asset" to insert a local mesh from your file system.
- Drag the gizmo to change pose; use “Export” to write MJCF/JSON.
Robot models are detected using a heuristic. See the section below on how to configure the editor to use different robot models.
Prompting / Scene Generation Examples
You can conveniently generate a MuJoCo scene from a natural-language prompt (requires an OpenAI API key):
# Set this to your API key
export OPENAI_API_KEY=...
# Generate a scene from a prompt string
mjprompt
# Edit the generated scene.
mjedit examples/prompt/scene_coffee_shop.xml
Loading a generated scene might not work out of the box in all cases. Generated scenes can have inconsistencies in geometry, but can be easily edited.
Examples
Below are some generated example scenes. More examples are available in the examples/prompt folder.
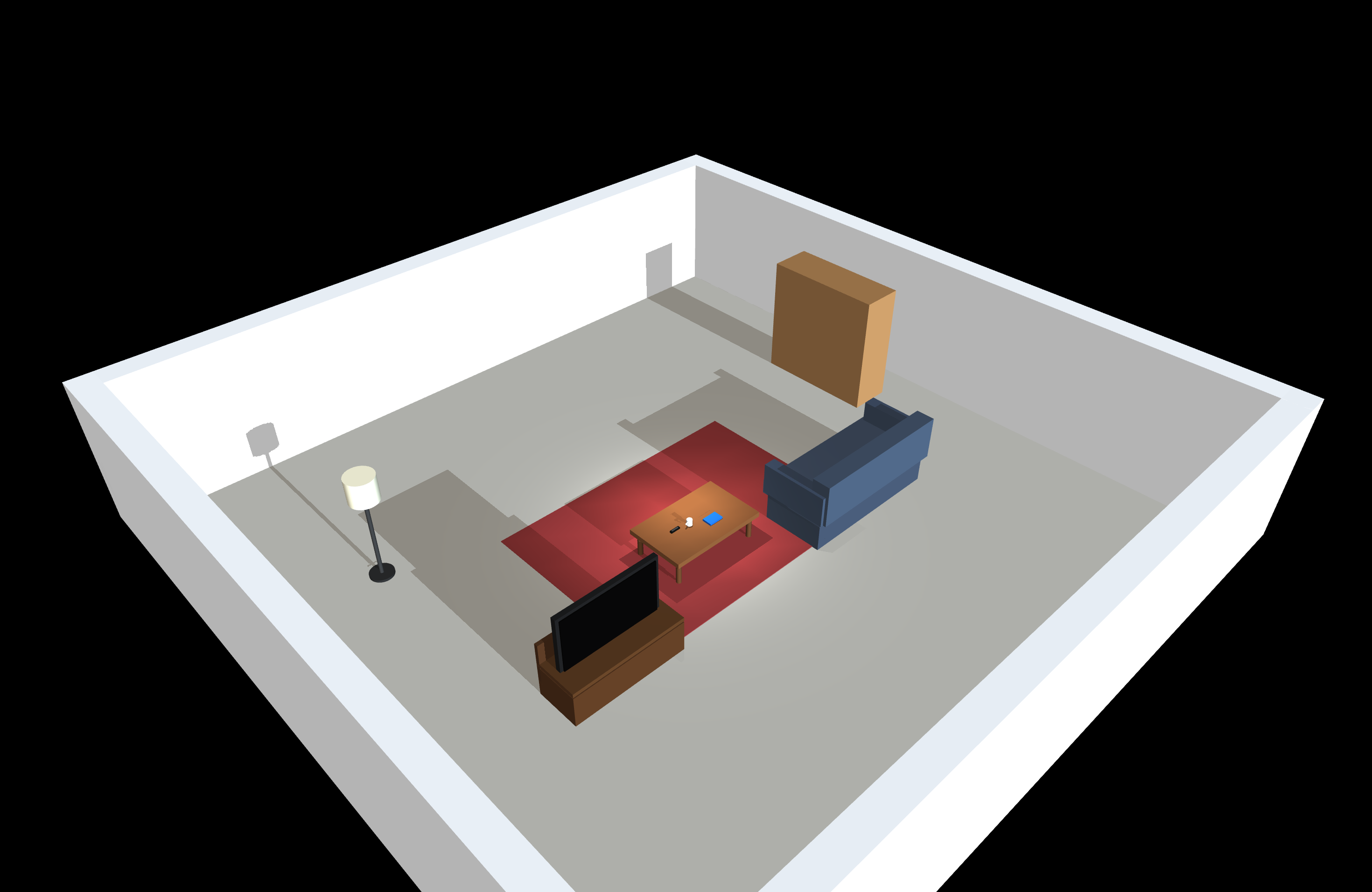
Living Room |
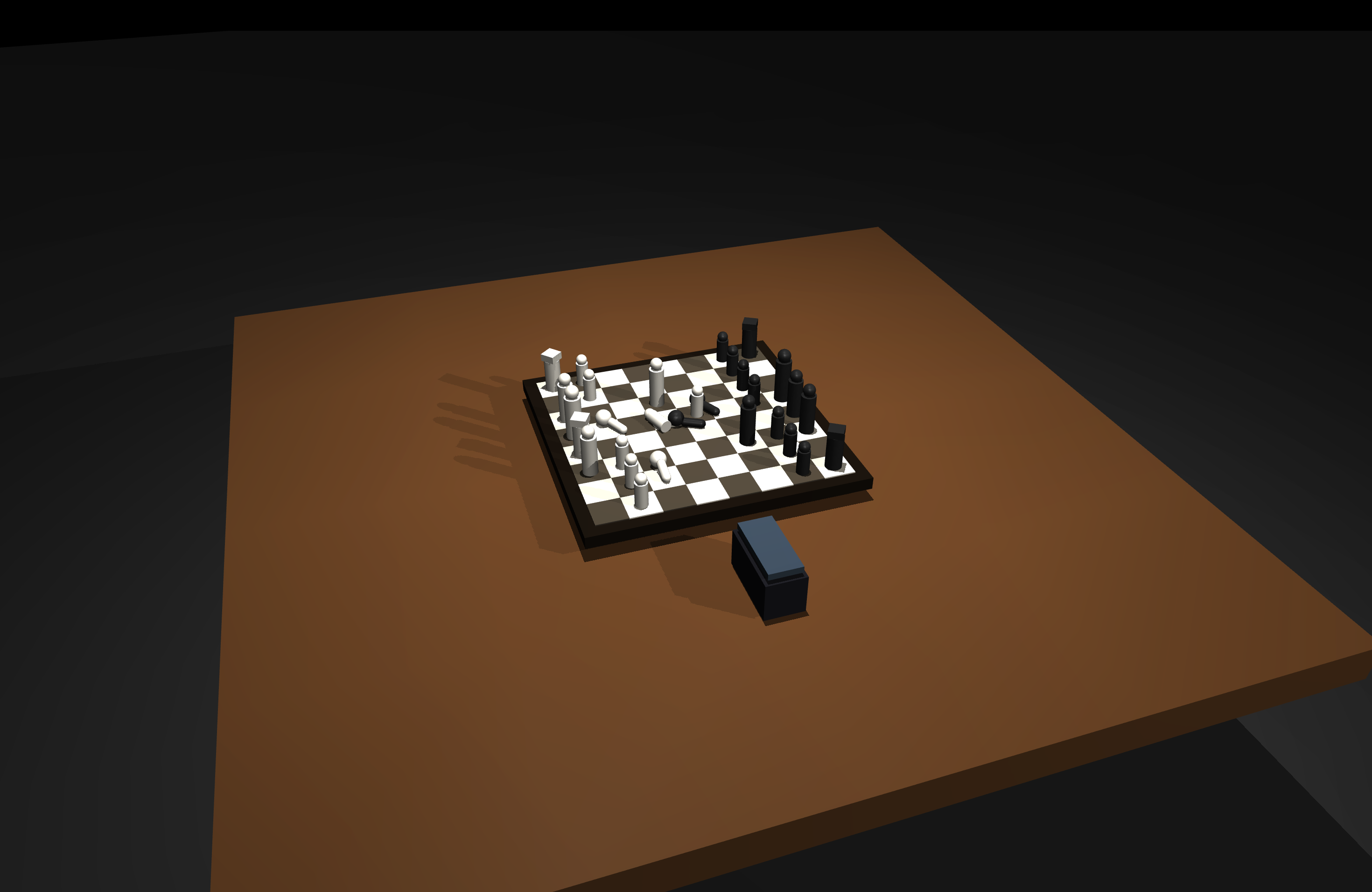
Chess Table |
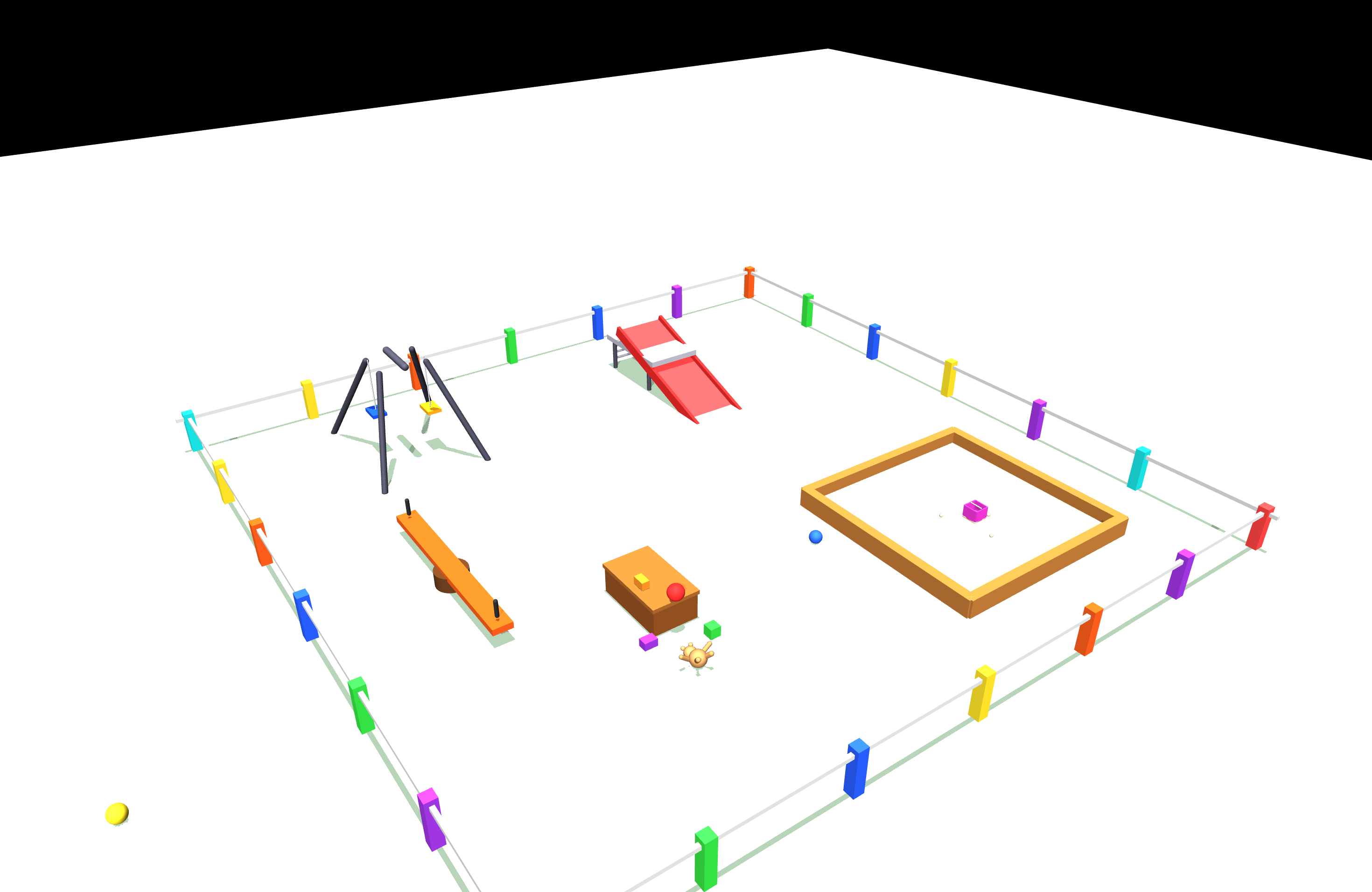
Playground |
Chemistry Lab |
Working with different robots or cameras
Robot models must be specified with a JSON configuration.
To work with additional robot models, set the ROBITS_CONFIG_DIR environment variable to another config folder. See the RoBits documentation for more details.
export ROBITS_CONFIG_DIR=$HOME/code/robits/robits_config/additional_config_sim
mjedit examples/prompt/scene_coffee_shop.xml
Limitations
- Importing MuJoCo XML files may alter the internal structure, and some tags are discarded.
- Joints/actuators are discarded if they are not part of a robot description.
- Additional geom tags, including friction, conaffinity, or contype are not yet supported and discarded.
- Light/option/compiler elements are not implemented yet.
If you are looking for a robot editor for MuJoCo that supports all the assets please checkout Robola web
- Not all MuJoCo robot descriptions have an equivalent URDF representation.
Links
Project details
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file mujoco_scene_editor-0.1.2.tar.gz.
File metadata
- Download URL: mujoco_scene_editor-0.1.2.tar.gz
- Upload date:
- Size: 23.9 kB
- Tags: Source
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.7
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
1923e5bbb4df48160191eb03a37c6d1338bc5833c096668d4b901a01c4c2bcde
|
|
| MD5 |
441c48ee6f9fb6ec64b18dcabfaabe13
|
|
| BLAKE2b-256 |
2669226d47b60b0edf9e6f927fe3ad3d449ee7f956e76471eb9636faeabc0c39
|
Provenance
The following attestation bundles were made for mujoco_scene_editor-0.1.2.tar.gz:
Publisher:
publish-to-test-pypi.yml on markusgrotz/mujoco-scene-editor
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
mujoco_scene_editor-0.1.2.tar.gz -
Subject digest:
1923e5bbb4df48160191eb03a37c6d1338bc5833c096668d4b901a01c4c2bcde - Sigstore transparency entry: 932001588
- Sigstore integration time:
-
Permalink:
markusgrotz/mujoco-scene-editor@301345ad9e2a4758cabacf22c95883e15a48e59d -
Branch / Tag:
refs/tags/v0.1.2 - Owner: https://github.com/markusgrotz
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish-to-test-pypi.yml@301345ad9e2a4758cabacf22c95883e15a48e59d -
Trigger Event:
push
-
Statement type:
File details
Details for the file mujoco_scene_editor-0.1.2-py3-none-any.whl.
File metadata
- Download URL: mujoco_scene_editor-0.1.2-py3-none-any.whl
- Upload date:
- Size: 32.7 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.7
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
f45d5b1f1a22852cb75d59dd4dfd9e8a31c3a1d9f45b069d1e7e548b699e8385
|
|
| MD5 |
928a854b29479bf2c441d8f5faffeb1d
|
|
| BLAKE2b-256 |
24e7c2558ae64b300d8271938c0dcaeae3fed1746b74753d0993821ec452280d
|
Provenance
The following attestation bundles were made for mujoco_scene_editor-0.1.2-py3-none-any.whl:
Publisher:
publish-to-test-pypi.yml on markusgrotz/mujoco-scene-editor
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
mujoco_scene_editor-0.1.2-py3-none-any.whl -
Subject digest:
f45d5b1f1a22852cb75d59dd4dfd9e8a31c3a1d9f45b069d1e7e548b699e8385 - Sigstore transparency entry: 932001663
- Sigstore integration time:
-
Permalink:
markusgrotz/mujoco-scene-editor@301345ad9e2a4758cabacf22c95883e15a48e59d -
Branch / Tag:
refs/tags/v0.1.2 - Owner: https://github.com/markusgrotz
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish-to-test-pypi.yml@301345ad9e2a4758cabacf22c95883e15a48e59d -
Trigger Event:
push
-
Statement type:







