Quadratic programming solvers in Python with a unified API

Project description
QP Solvers for Python
Installation | Usage | Example | Solvers | FAQ | Benchmark





Unified interface to Quadratic Programming (QP) solvers available in Python.
Installation
To install both the library and a starter set of free QP solvers:
pip install qpsolvers[starter_solvers]
To only install the library:
pip install qpsolvers
Check out the documentation for Python 2 or Windows instructions.
Usage
The library provides a one-stop shop solve_qp function with a solver keyword argument to select the backend solver. It solves convex quadratic programs in standard form:
$$ \begin{split} \begin{array}{ll} \mbox{minimize} & \frac{1}{2} x^T P x + q^T x \ \mbox{subject to} & G x \leq h \ & A x = b \ & lb \leq x \leq ub \end{array} \end{split} $$
Vector inequalities are taken coordinate by coordinate. For most solvers, the matrix $P$ should be positive definite.
📢 The solver keyword argument is mandatory since v2.0. (In prior versions, a default solver was implicitly selected.) Changes to the API are reported in the Announcements.
Example
To solve a quadratic program, build the matrices that define it and call the solve_qp function:
from numpy import array, dot
from qpsolvers import solve_qp
M = array([[1., 2., 0.], [-8., 3., 2.], [0., 1., 1.]])
P = dot(M.T, M) # this is a positive definite matrix
q = dot(array([3., 2., 3.]), M)
G = array([[1., 2., 1.], [2., 0., 1.], [-1., 2., -1.]])
h = array([3., 2., -2.])
A = array([1., 1., 1.])
b = array([1.])
x = solve_qp(P, q, G, h, A, b, solver="osqp")
print("QP solution: x = {}".format(x))
This example outputs the solution [0.30769231, -0.69230769, 1.38461538].
Solvers
| Solver | Keyword | Type | License | Warm-start |
|---|---|---|---|---|
| CVXOPT | cvxopt |
Dense | GPL-3.0 | ✔️ |
| ECOS | ecos |
Sparse | GPL-3.0 | ✖️ |
| Gurobi | gurobi |
Sparse | Commercial | ✖️ |
| MOSEK | mosek |
Sparse | Commercial | ✔️ |
| OSQP | osqp |
Sparse | Apache-2.0 | ✔️ |
| ProxQP | proxqp |
Dense & Sparse | BSD-2-Clause | ✔️ |
| qpOASES | qpoases |
Dense | LGPL-2.1 | ➖ |
| qpSWIFT | qpswift |
Sparse | GPL-3.0 | ✖️ |
| quadprog | quadprog |
Dense | GPL-2.0 | ✖️ |
| SCS | scs |
Sparse | MIT | ✔️ |
Frequently Asked Questions
- Can I print the list of solvers available on my machine?
- Absolutely:
print(qpsolvers.available_solvers)
- Absolutely:
- Is it possible to solve a least squares rather than a quadratic program?
- Yes, there is also a
solve_lsfunction.
- Yes, there is also a
- I have a squared norm in my cost function, how can I apply a QP solver to my problem?
- You can cast squared norms to QP matrices and feed the result to
solve_qp.
- You can cast squared norms to QP matrices and feed the result to
- I have a non-convex quadratic program. Is there a solver I can use?
- I get the following build error on Windows when running
pip install qpsolvers.- You will need to install the Visual C++ Build Tools to build all package dependencies.
- Can I help?
- Absolutely! The first step is to install the library and use it. Report any bug in the issue tracker.
- If you're a developer looking to hack on open source, check out the contribution guidelines for suggestions.
Benchmark
On a dense problem, the performance of all solvers (as measured by IPython's %timeit on an Intel(R) Core(TM) i7-6700K CPU @ 4.00GHz) is:
| Solver | Type | Time (ms) |
|---|---|---|
| qpswift | Dense | 0.008 |
| quadprog | Dense | 0.01 |
| qpoases | Dense | 0.02 |
| osqp | Sparse | 0.03 |
| scs | Sparse | 0.03 |
| ecos | Sparse | 0.27 |
| cvxopt | Dense | 0.44 |
| gurobi | Sparse | 1.74 |
| cvxpy | Sparse | 5.71 |
| mosek | Sparse | 7.17 |
On a sparse problem with n = 500 optimization variables, these performances become:
| Solver | Type | Time (ms) |
|---|---|---|
| osqp | Sparse | 1 |
| qpswift | Dense | 2 |
| scs | Sparse | 4 |
| cvxpy | Sparse | 11 |
| mosek | Sparse | 17 |
| ecos | Sparse | 33 |
| cvxopt | Dense | 51 |
| gurobi | Sparse | 221 |
| quadprog | Dense | 427 |
| qpoases | Dense | 1560 |
On a model predictive control problem for robot locomotion, we get:
| Solver | Type | Time (ms) |
|---|---|---|
| quadprog | Dense | 0.03 |
| qpswift | Dense | 0.08 |
| qpoases | Dense | 0.36 |
| osqp | Sparse | 0.48 |
| ecos | Sparse | 0.69 |
| scs | Sparse | 0.76 |
| cvxopt | Dense | 2.75 |
| cvxpy | Sparse | 7.02 |
Finally, here is a small benchmark of random dense problems (each data point corresponds to an average over 10 runs):
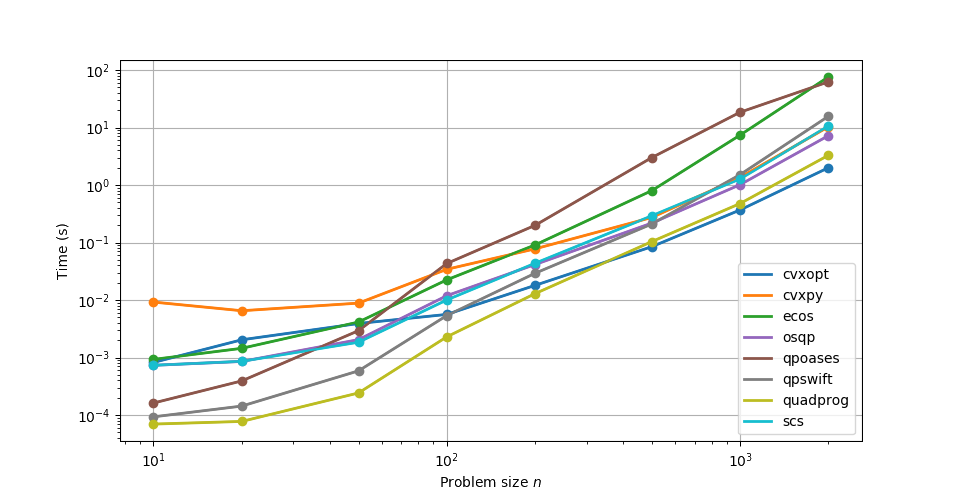
Note that performances of QP solvers largely depend on the problem solved. For instance, MOSEK performs an automatic conversion to Second-Order Cone Programming (SOCP) which the documentation advises bypassing for better performance. Similarly, ECOS reformulates from QP to SOCP and works best on small problems.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file qpsolvers-2.3.0.tar.gz.
File metadata
- Download URL: qpsolvers-2.3.0.tar.gz
- Upload date:
- Size: 51.7 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: python-requests/2.22.0
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
900cab8cc024b38fb79e70934bb0e7055c382d8c2970376b98360e64bcc0cee7
|
|
| MD5 |
b3c4030ab6a7805180c4468819e8bd92
|
|
| BLAKE2b-256 |
7f2cb93cec0322d1efe4e37f375f71c1dfe5bdc5ca456f032e0c6d39c25edda0
|
File details
Details for the file qpsolvers-2.3.0-py3-none-any.whl.
File metadata
- Download URL: qpsolvers-2.3.0-py3-none-any.whl
- Upload date:
- Size: 47.0 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: python-requests/2.22.0
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
18ab8d9c1f09aa11a728f539029352792520bee04e2fa5f613fdf2b929b8705b
|
|
| MD5 |
e830db9f9202e73b6f9b5a4f9dac16c3
|
|
| BLAKE2b-256 |
5bfa0746c6fbe522a4849051b3f8c5eddaed30a1f4c349173fff657b10f6180e
|







